Rotating And Retracting Electromagnetic Suction Jaws SolidWorks
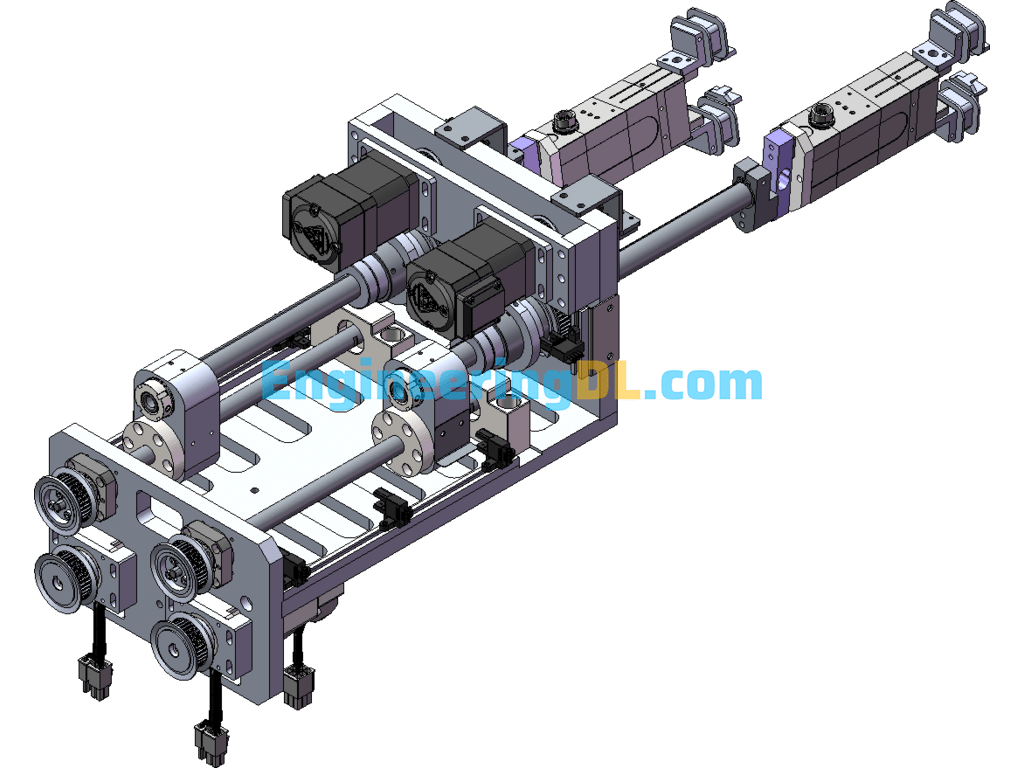
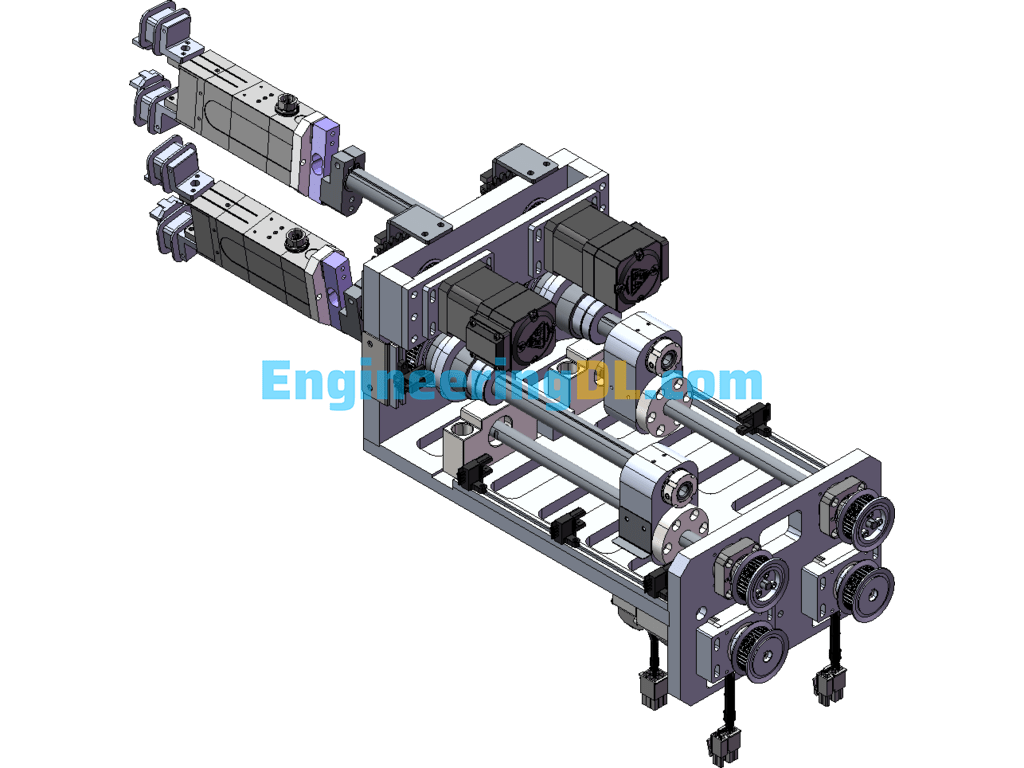
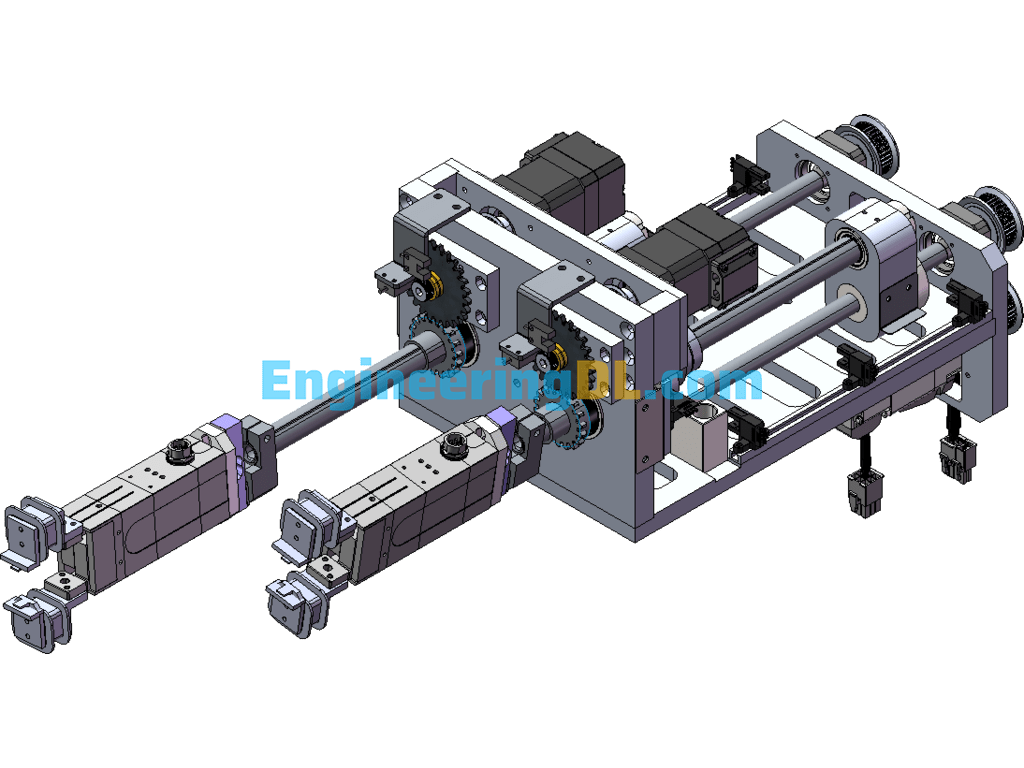
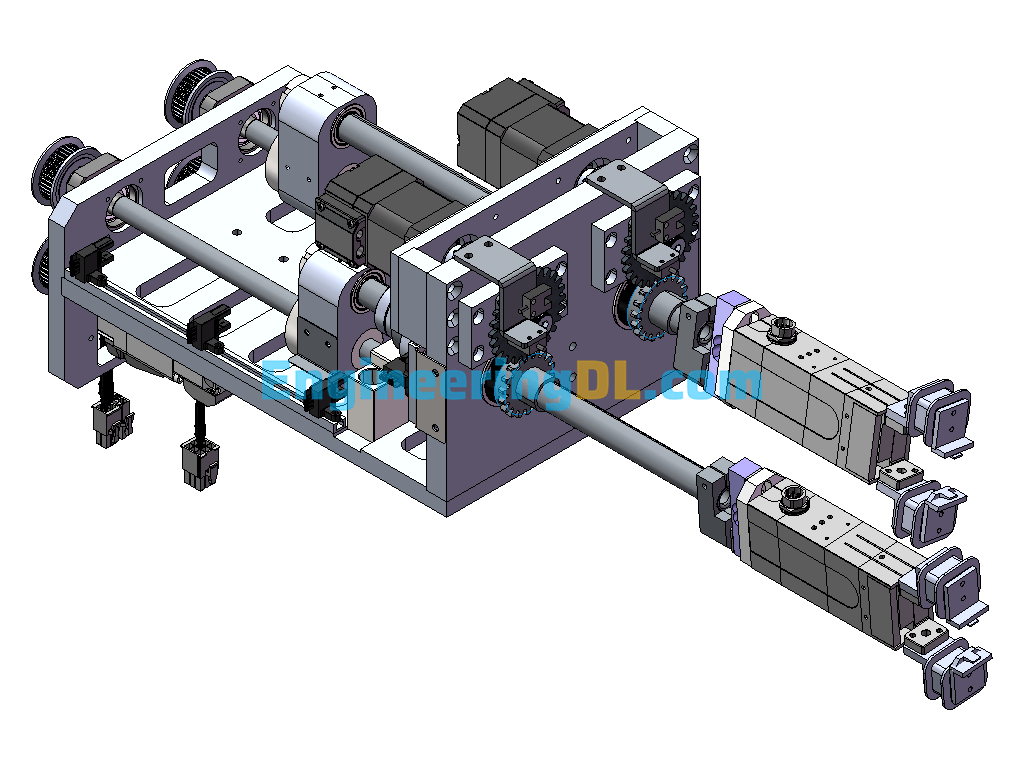
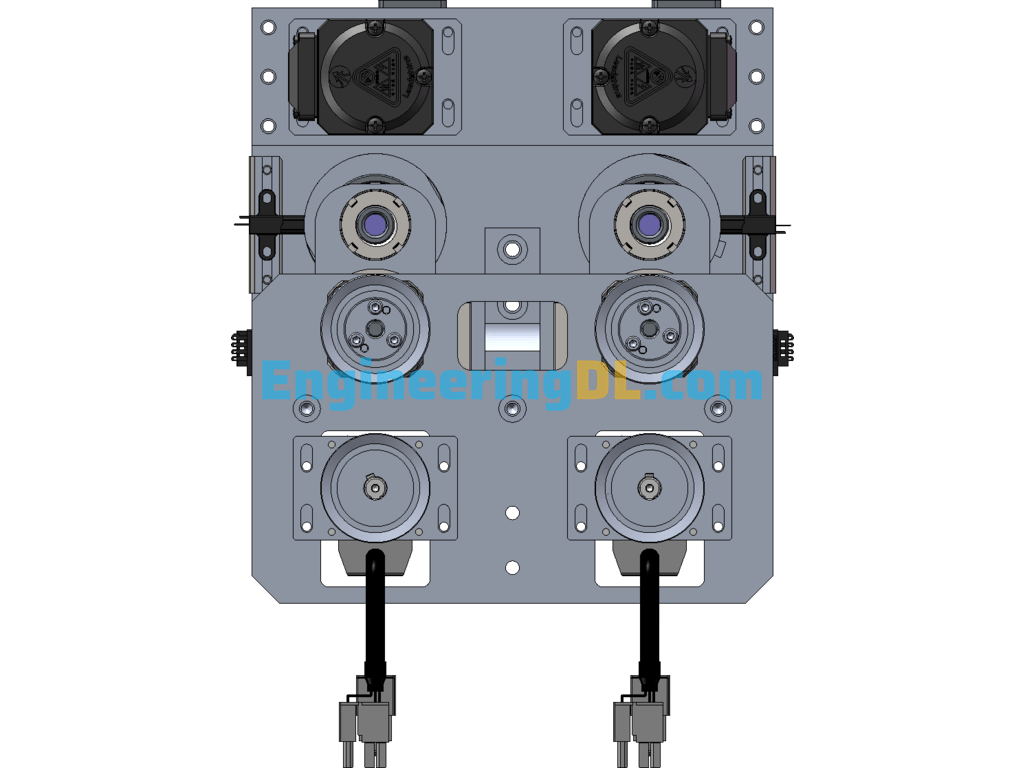
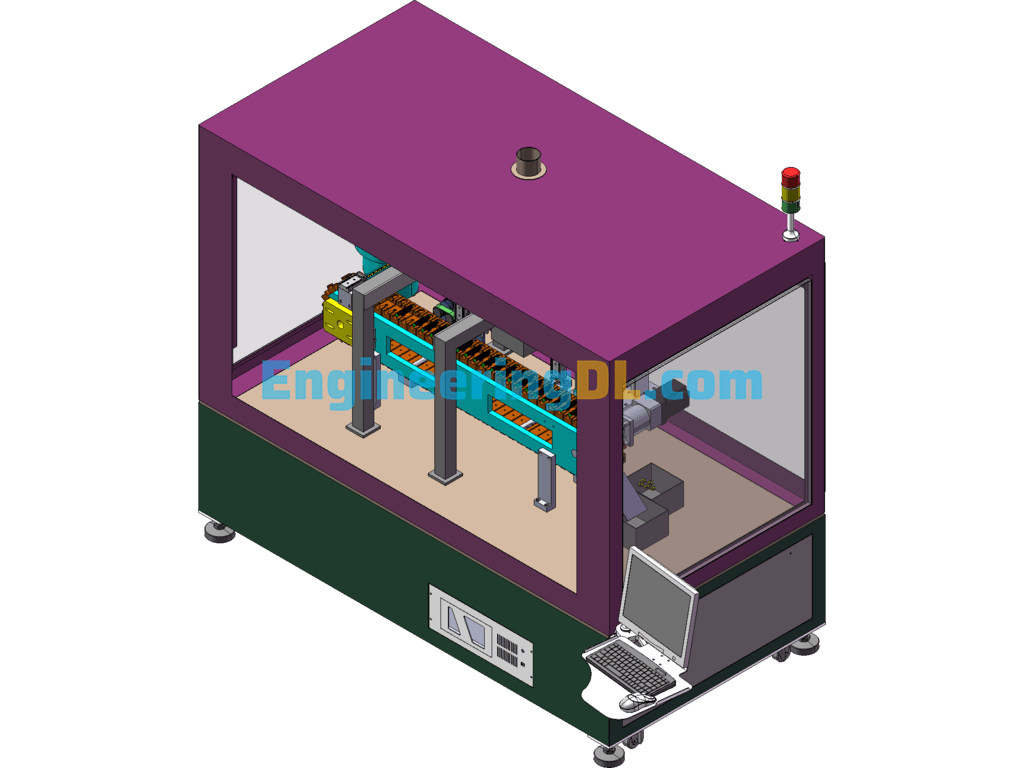
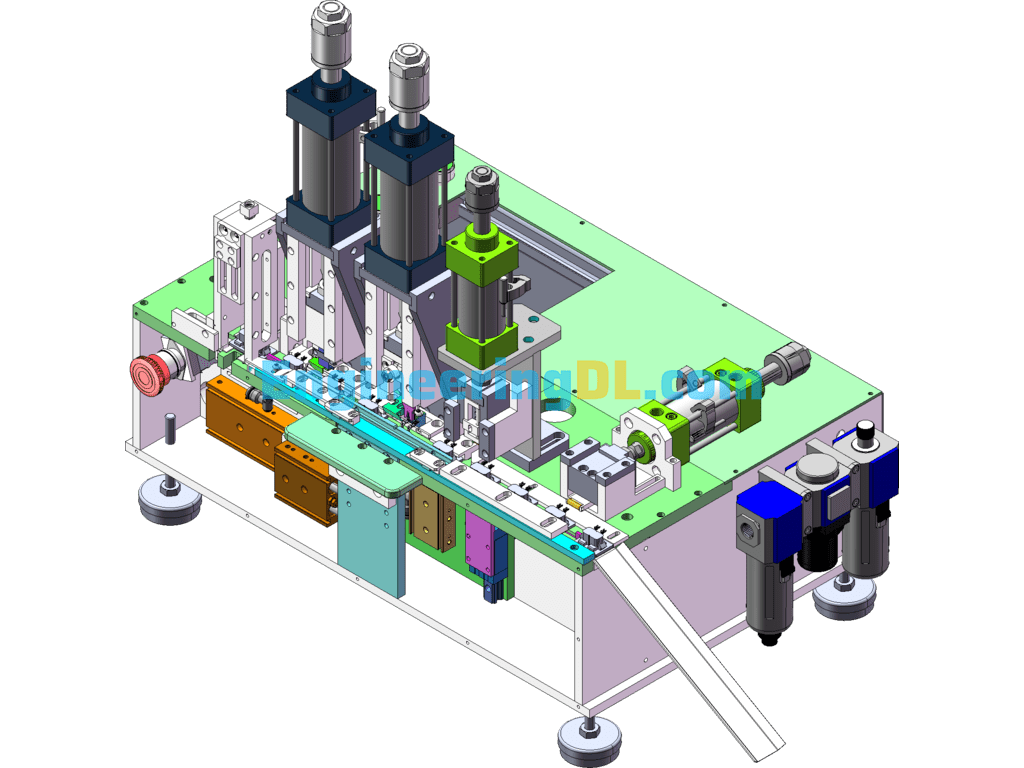
This set of models for the robot end-axis hand claw, using dual-station independent design, telescoping mechanism using 1210 ball screw mechanism drive mechanism for the Panasonic servo motor and synchronous belt transmission mechanism. The rotating mechanism is slt016 ball spline structure, using hollow spline shaft to facilitate the threading of the magnetic claw. The rotation limit mechanism uses gear mechanism to control the rotation angle within 380??. The file package contains step, igs, x_t, easm and other format files.
Specification: Rotating And Retracting Electromagnetic Suction Jaws SolidWorks
|
User Reviews
Be the first to review “Rotating And Retracting Electromagnetic Suction Jaws SolidWorks”
You must be logged in to post a review.

Rotating And Retracting Electromagnetic Suction Jaws SolidWorks

There are no reviews yet.