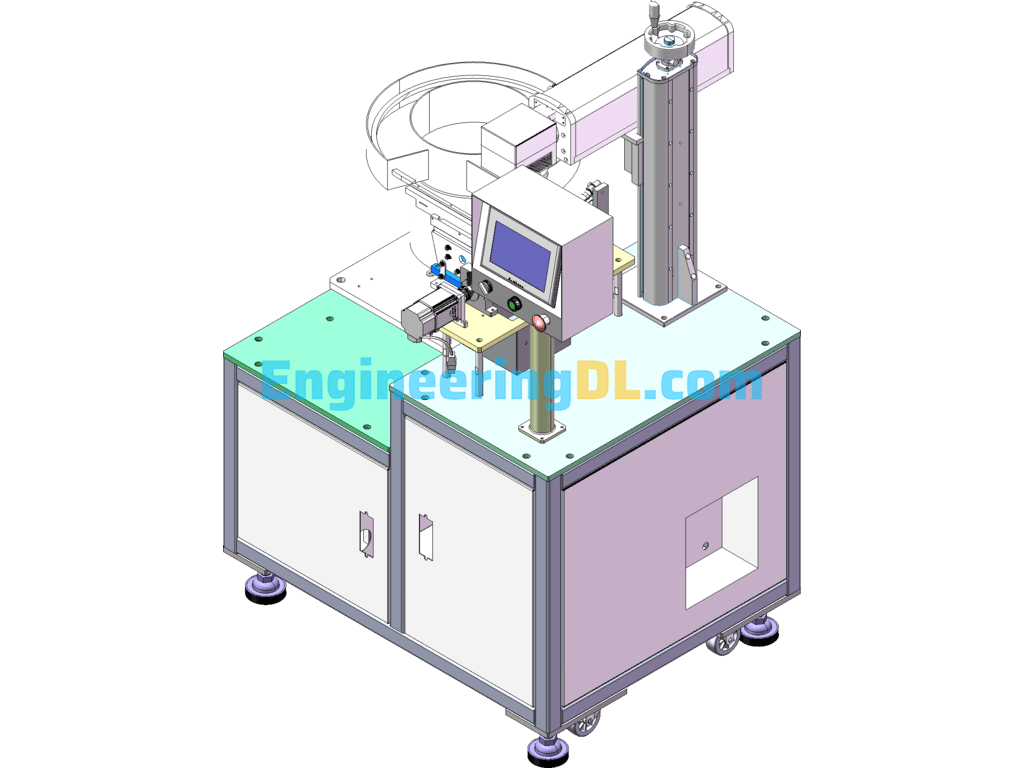
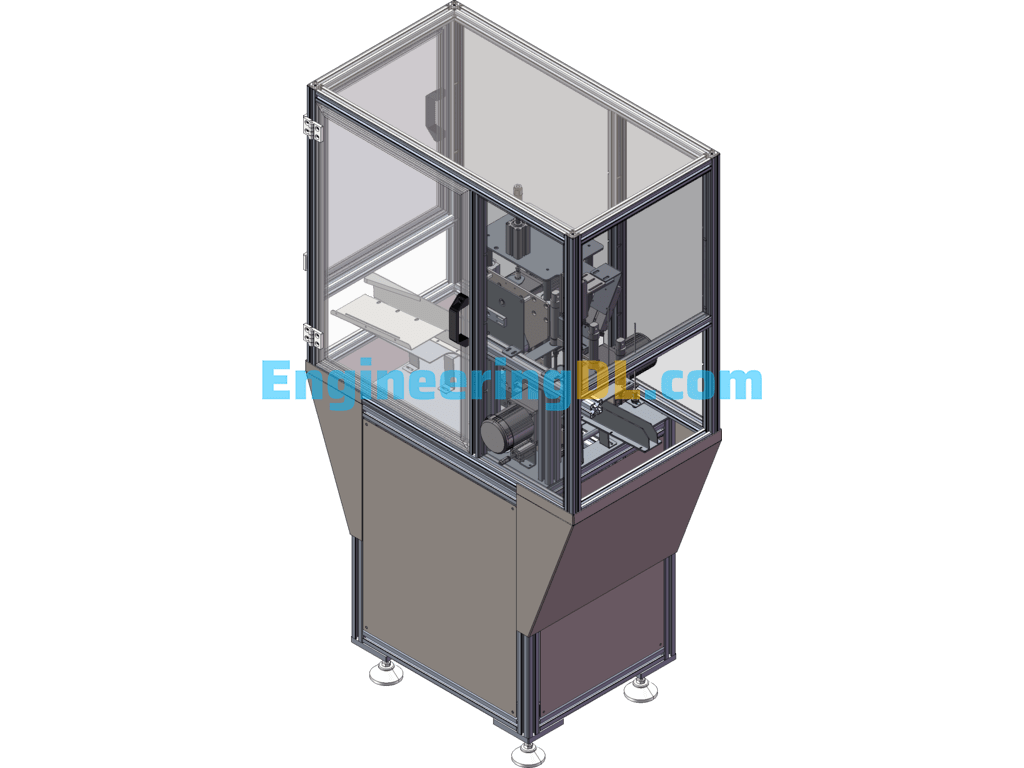
Robot End-Axis Pneumatic Hand Gripper SolidWorks, eDrawings, 3D Exported
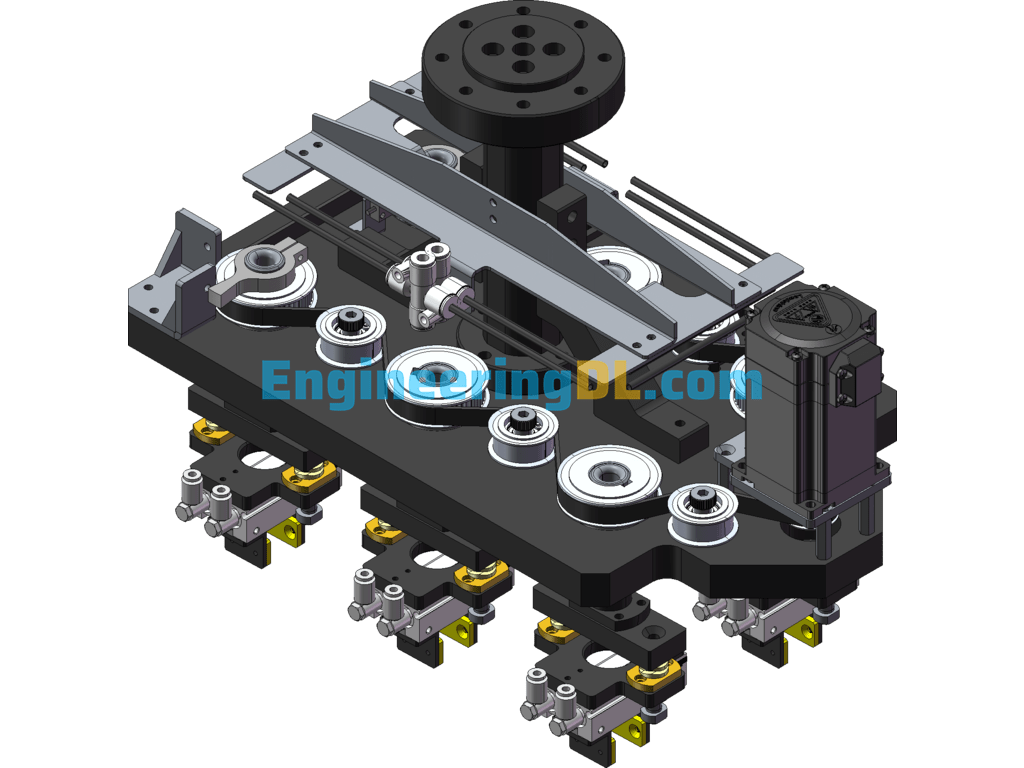
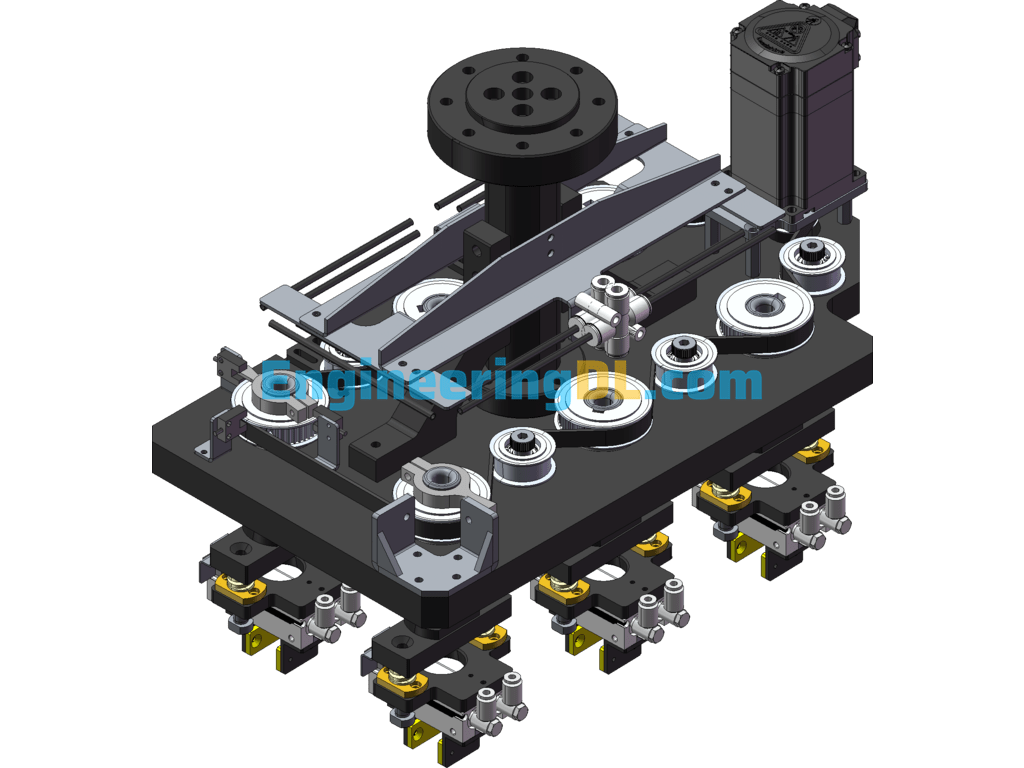
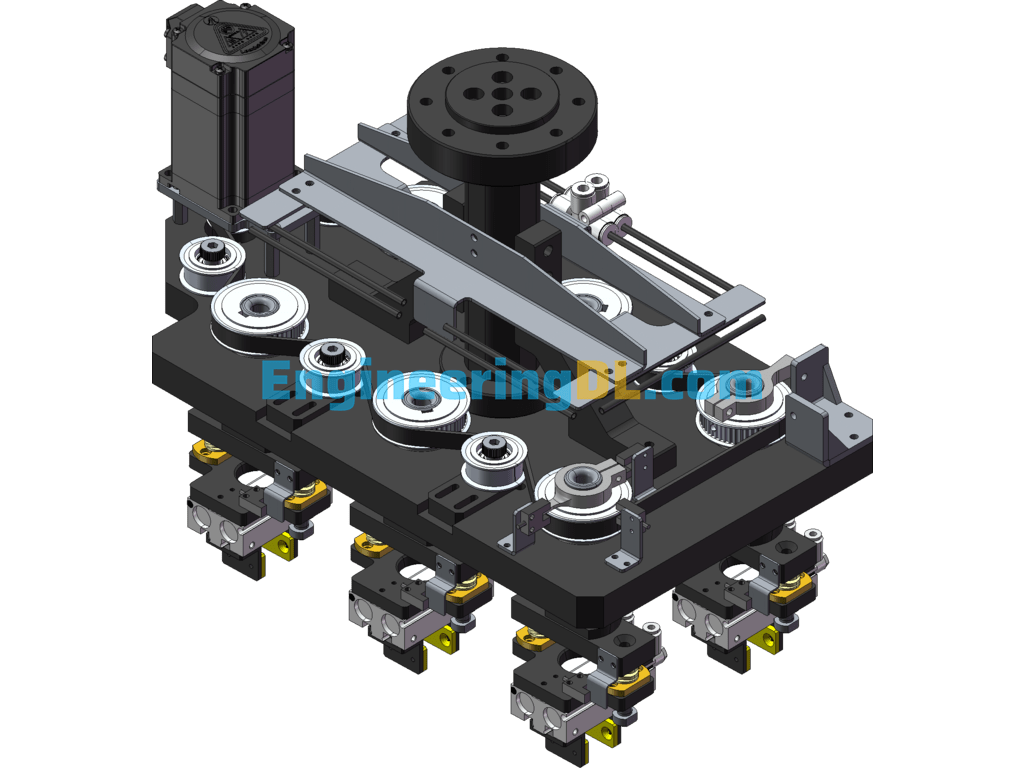
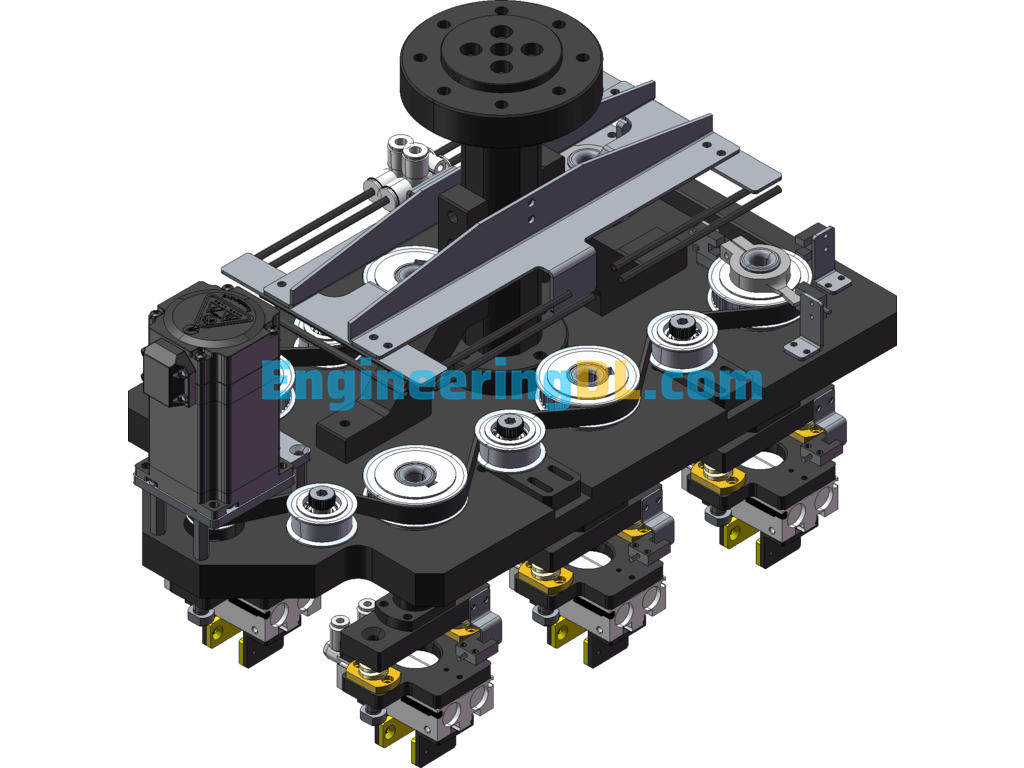
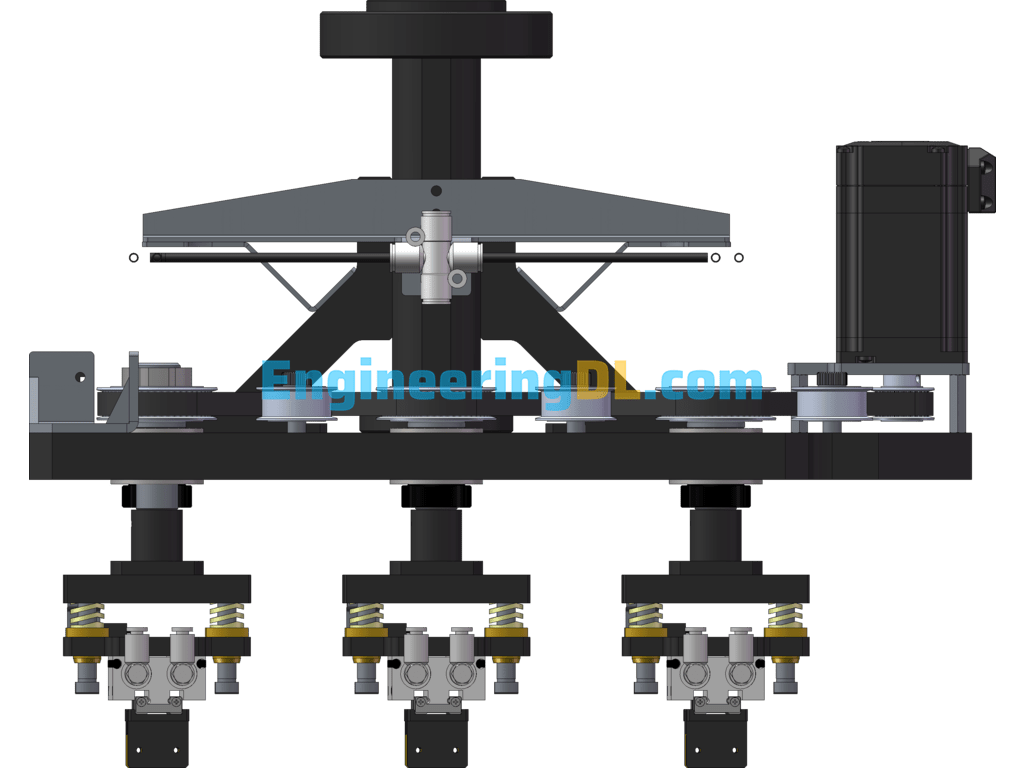
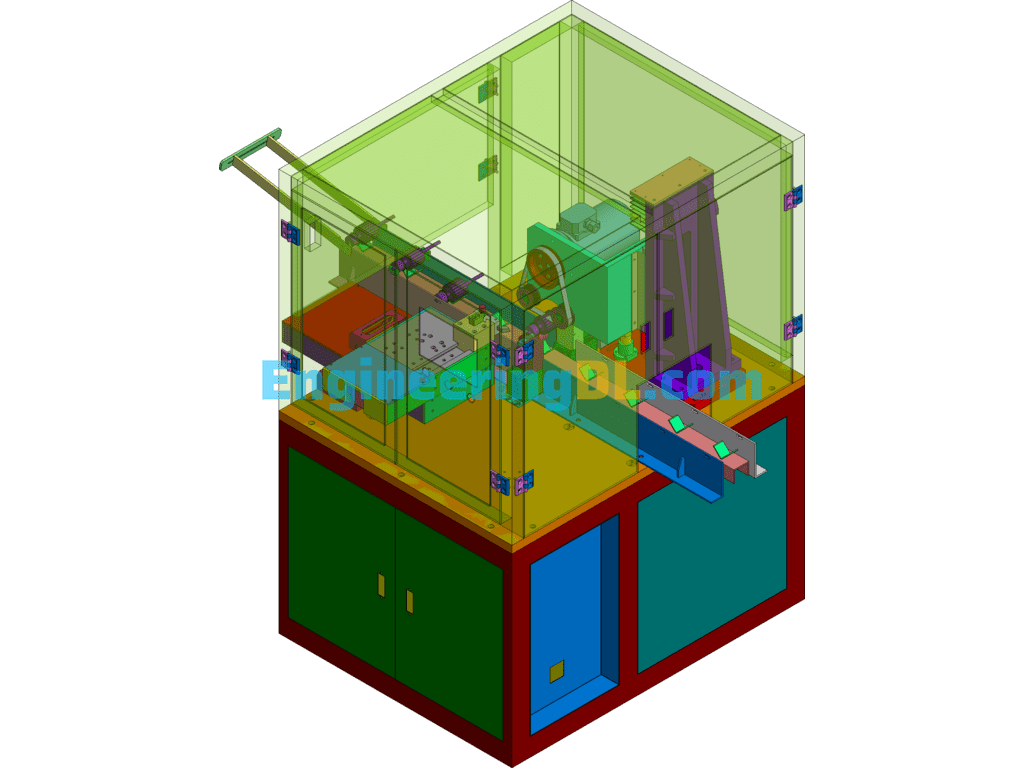
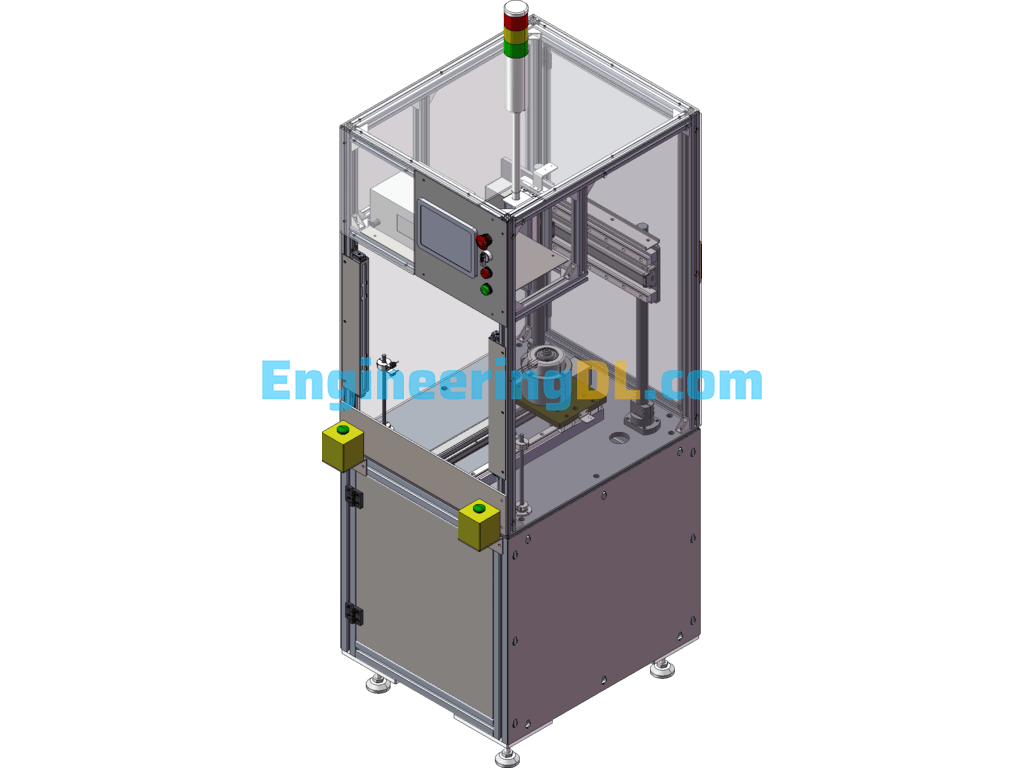
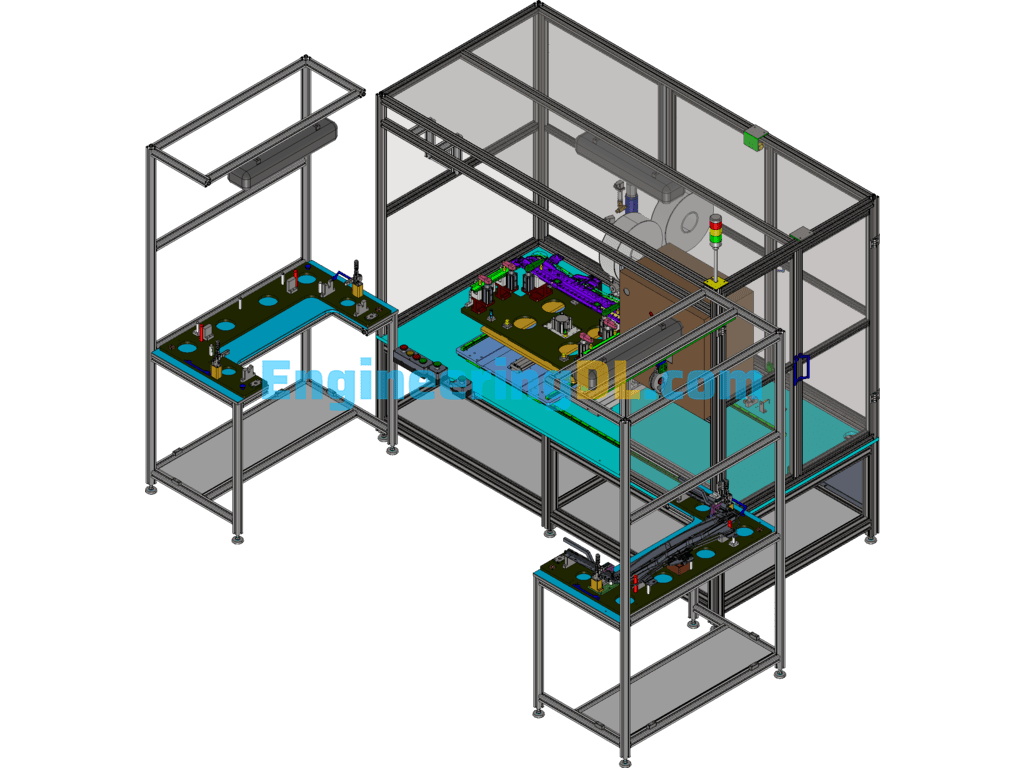
This set of drawings for the robot end-axis hand claw, using 2×3 layout, the rotation angle to meet 270 degrees (electronic limit of 270 degrees, mechanical limit of 280 degrees), the limit mechanism to prevent the motor overshoot. The rotation of the hand claw is driven by a synchronous belt mechanism, with a transmission ratio of 1:2. The hand claw uses a mechanical clamping jaw with a high cost performance, and the hand claw is designed with a Z-axis collision sensor to allow a 3mm impact on the Z-axis to avoid a rigid collision. The file contains SLDASM/STP/IGS/EASM/X_T and other formats for ease of use.
Specification: Robot End-Axis Pneumatic Hand Gripper SolidWorks, eDrawings, 3D Exported
|
User Reviews
Be the first to review “Robot End-Axis Pneumatic Hand Gripper SolidWorks, eDrawings, 3D Exported”
You must be logged in to post a review.

Robot End-Axis Pneumatic Hand Gripper SolidWorks, eDrawings, 3D Exported
There are no reviews yet.