Parallel Robots SolidWorks
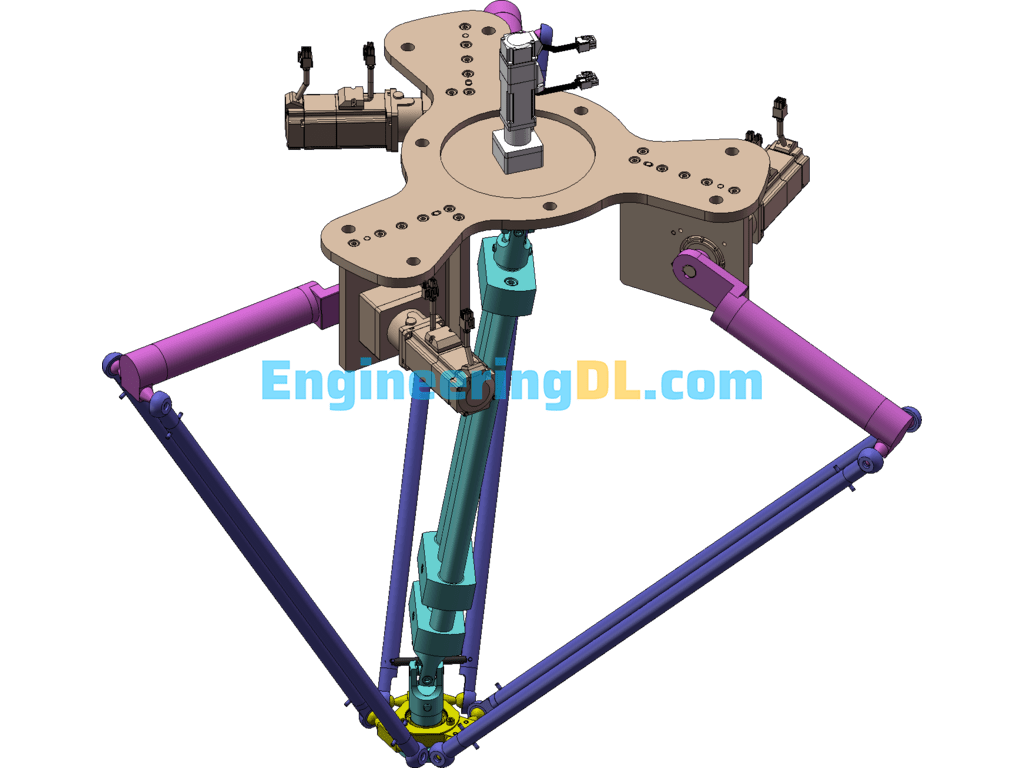

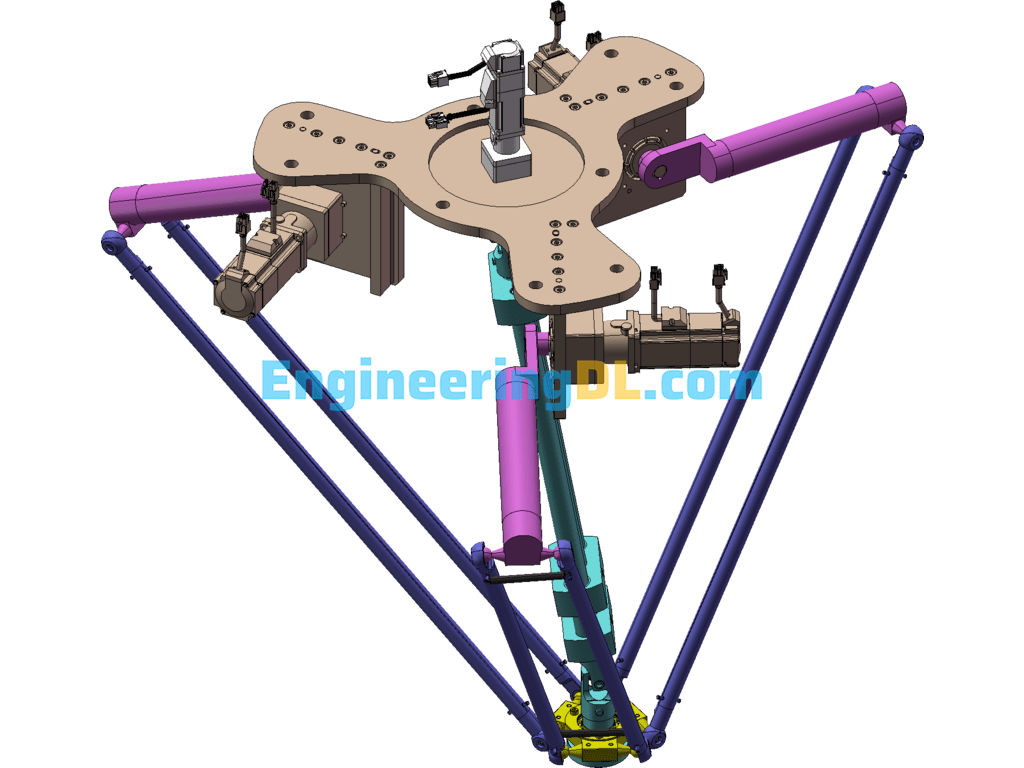
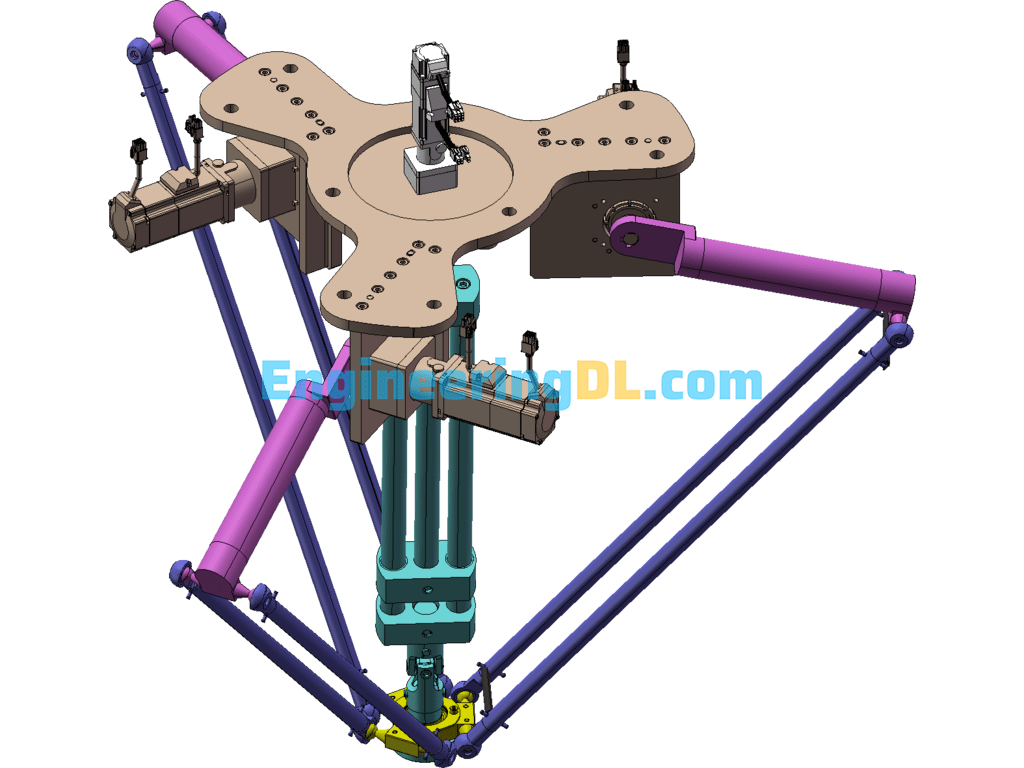
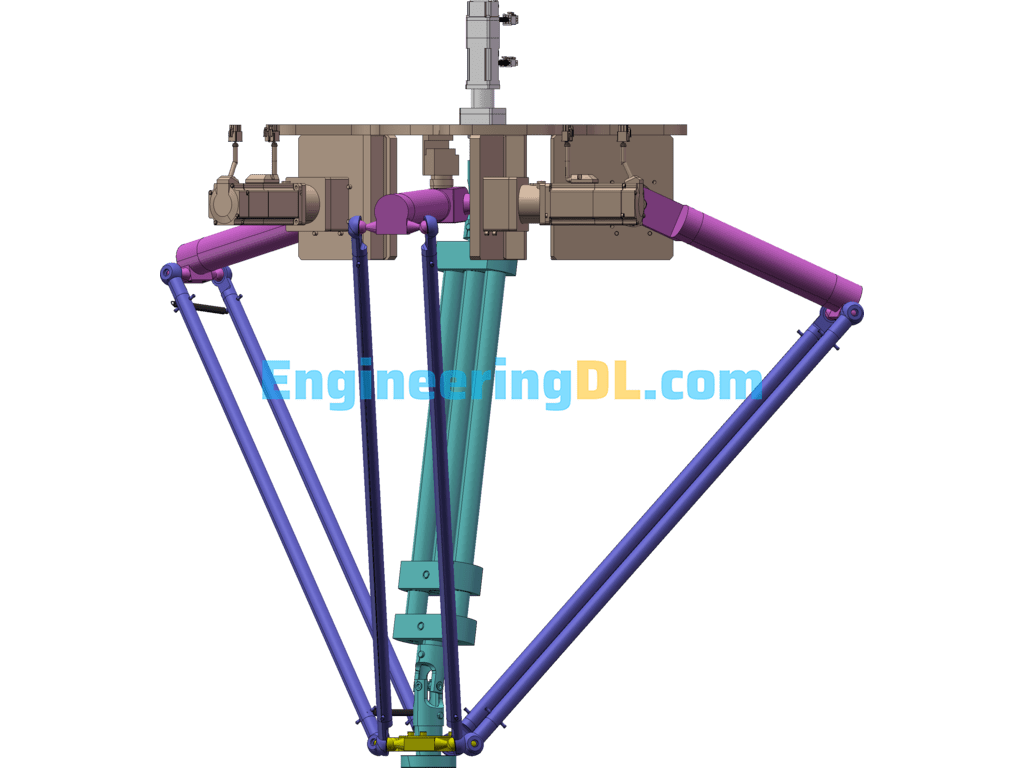
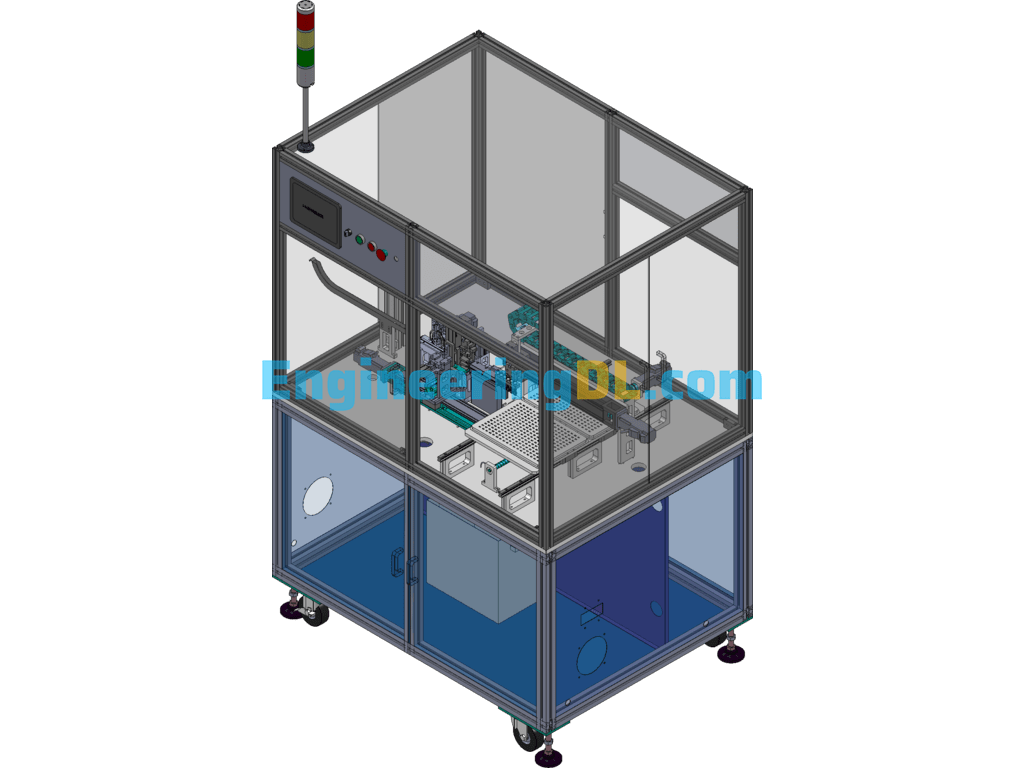
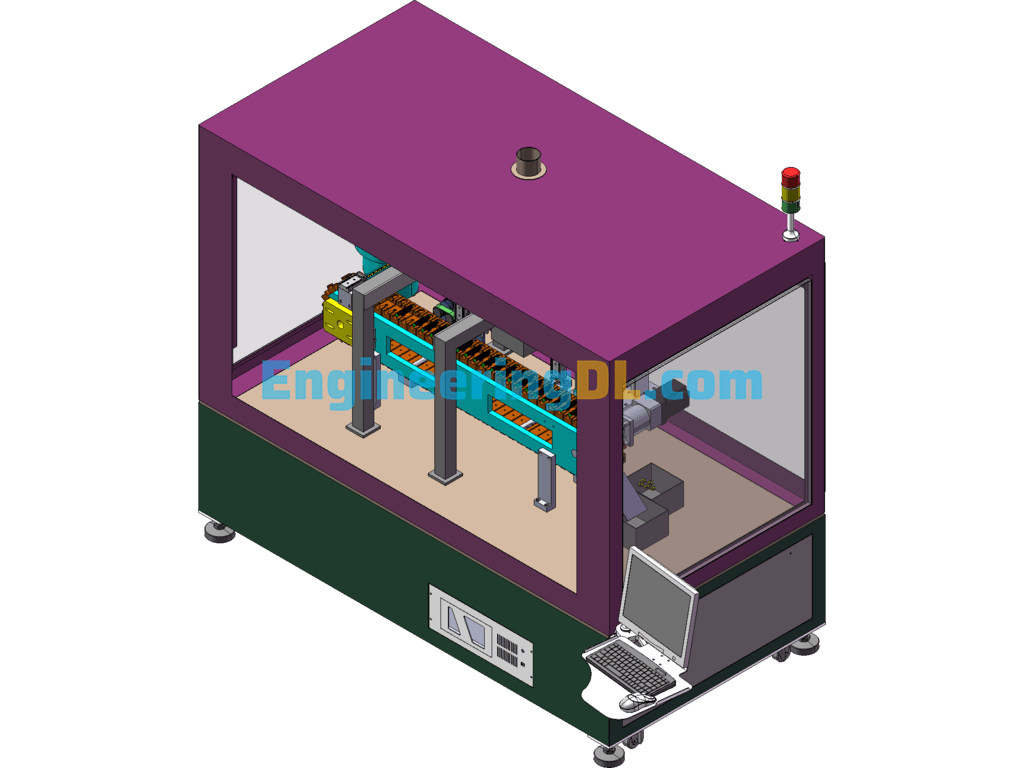
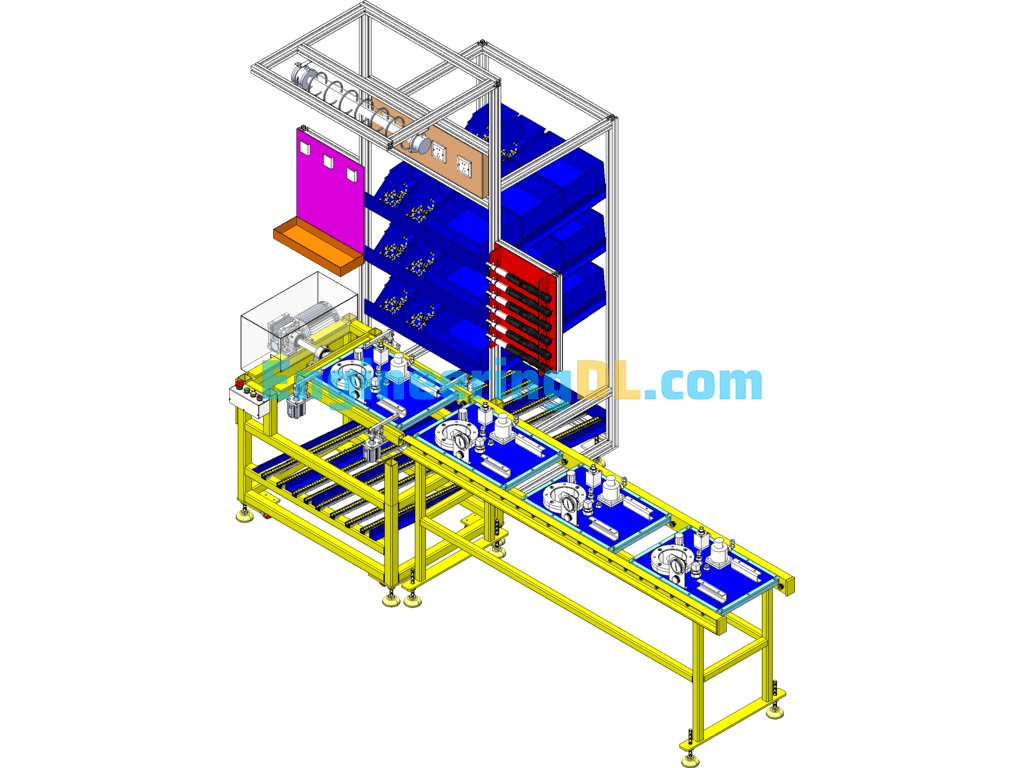
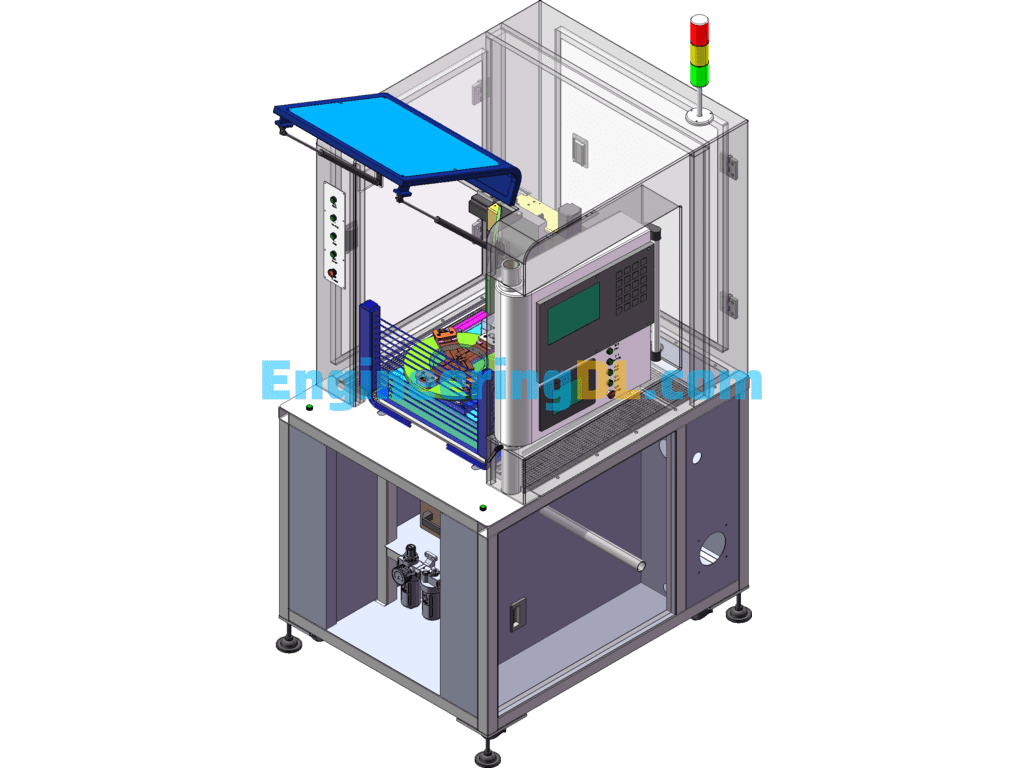
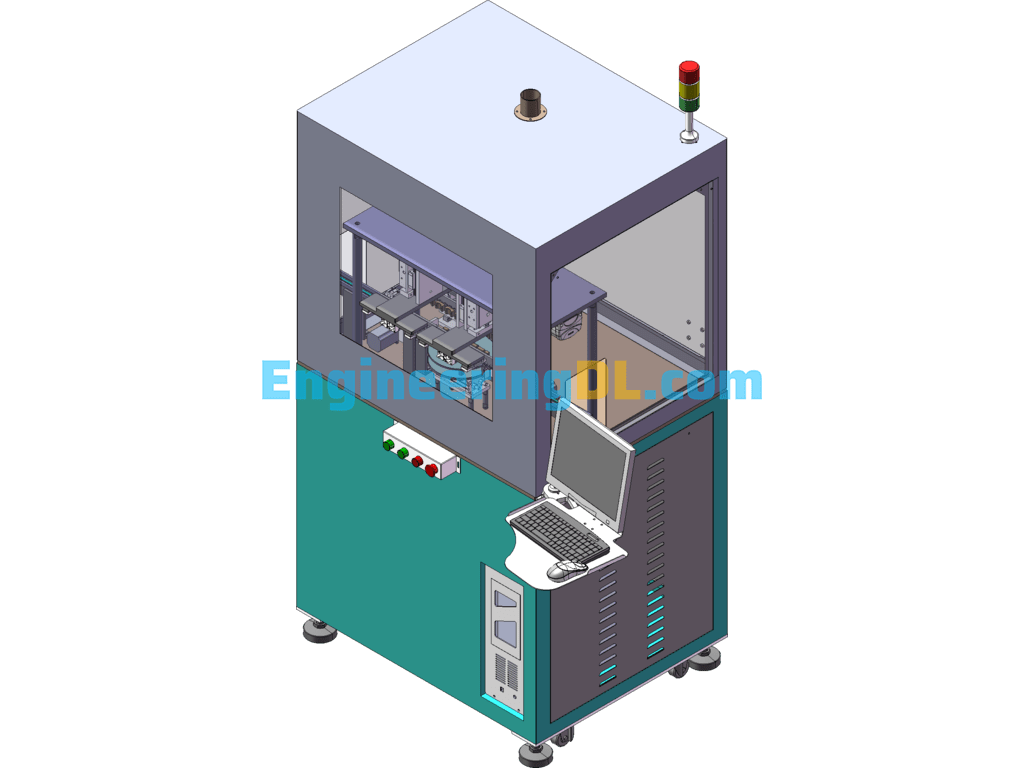
The parallel manipulator design model is an automatic operation device that can imitate certain action functions of human hands and arms to grasp and carry objects or manipulate tools according to a fixed procedure. This model is designed using SolidWorks modeling, with detailed parameters can be edited, welcome to download and learn if you like!
Specification: Parallel Robots SolidWorks
|
User Reviews
Be the first to review “Parallel Robots SolidWorks”
You must be logged in to post a review.


There are no reviews yet.