Sawing Machine 3D Model SolidWorks
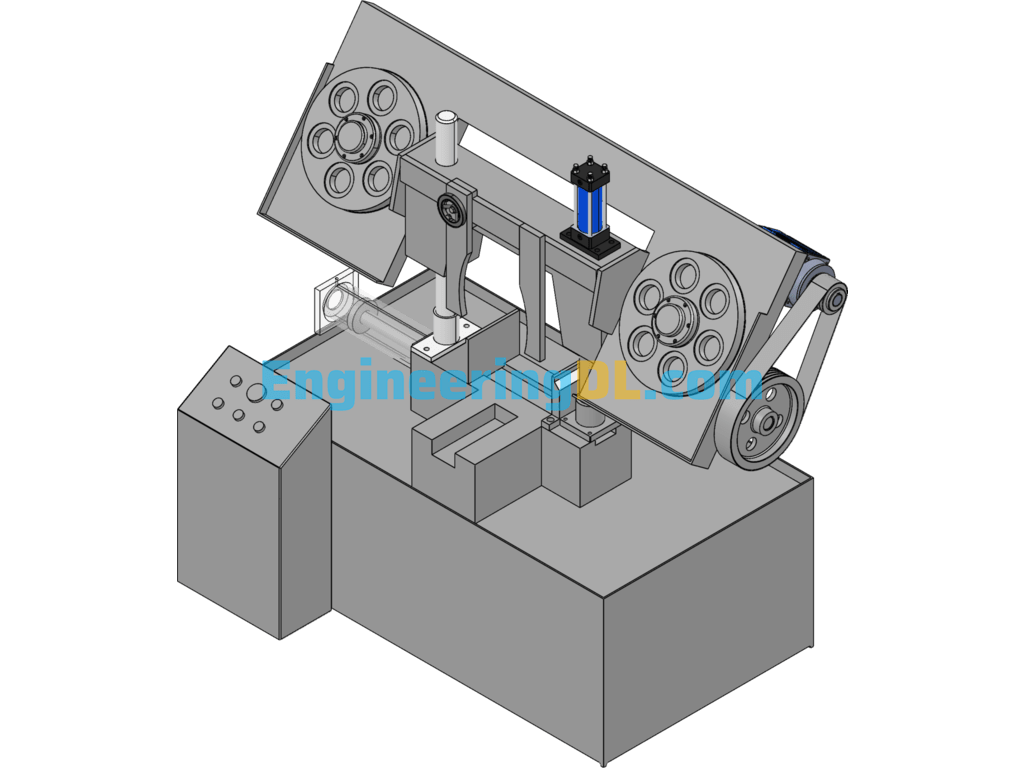
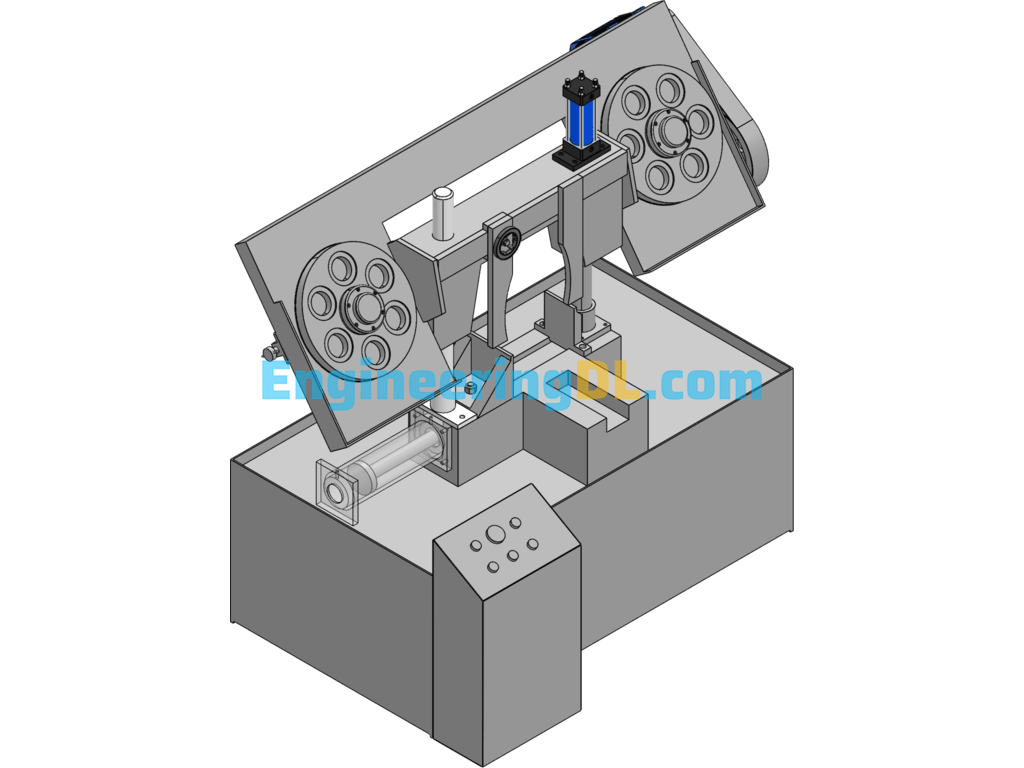
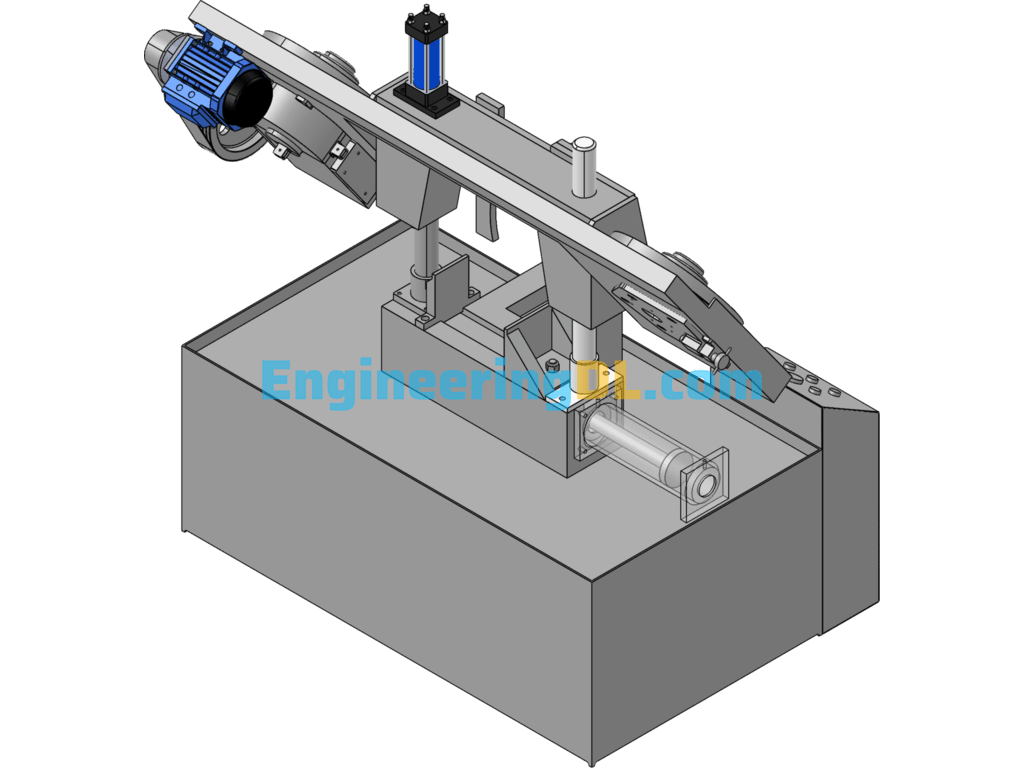
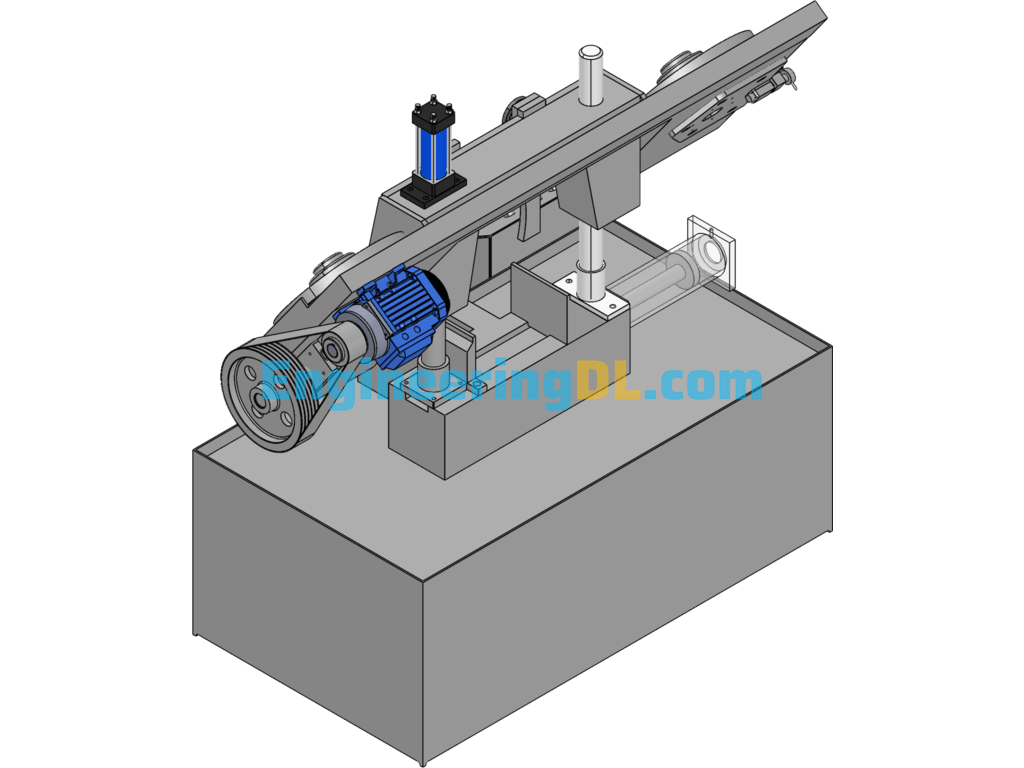
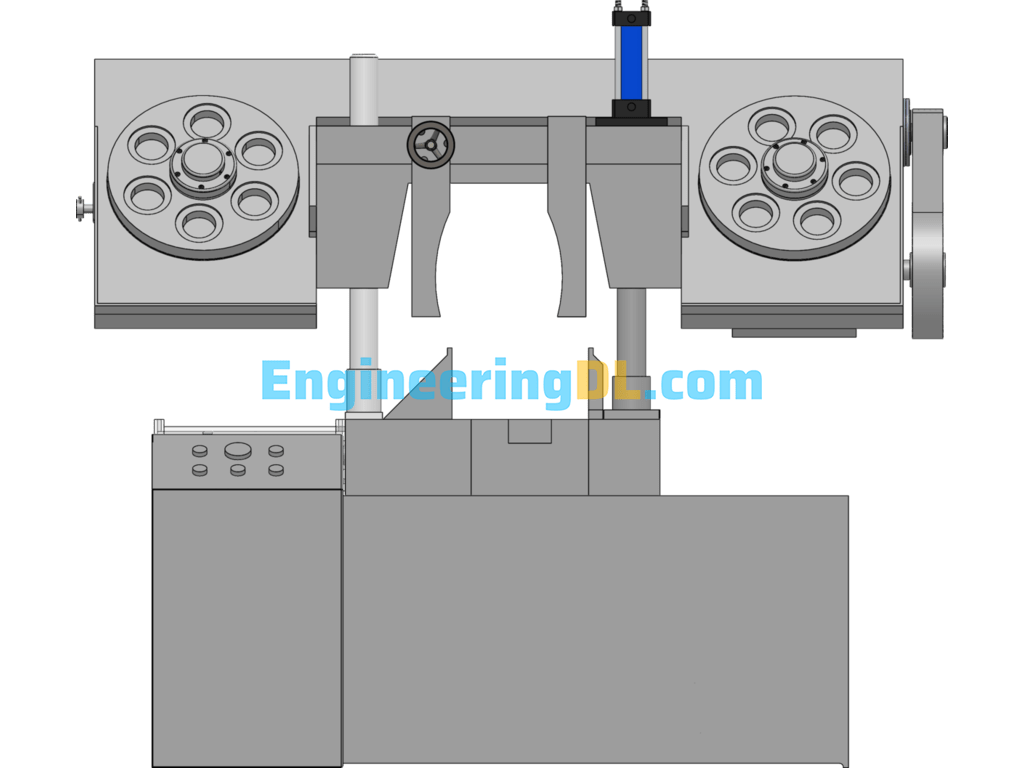
The servo position control module of the sawing machine system adopts a combination of sampling interpolation and foreseeing control of position control (the specific control is omitted) Shanghai Guangnai electromechanical through the system experience value and the current state, decide to close the feeding cylinder position, so that the feeding cylinder stops just to reach the target position. Due to the electromagnetic mechanical hysteresis and motion inertia, it is almost impossible to control the feeding slide to move 0.1mm by “pass” and “break”. In order to ensure the minimum feeding length and feeding accuracy, the rear clamp makes the feeding slide back to the LK position and then moves forward to the predicted position LT to close the feeding solenoid valve. When the feeding cylinder movement stops the rear clamp clamps tight.
Specification: Sawing Machine 3D Model SolidWorks
|
User Reviews
Be the first to review “Sawing Machine 3D Model SolidWorks”
You must be logged in to post a review.

There are no reviews yet.