Robots, Robots SolidWorks
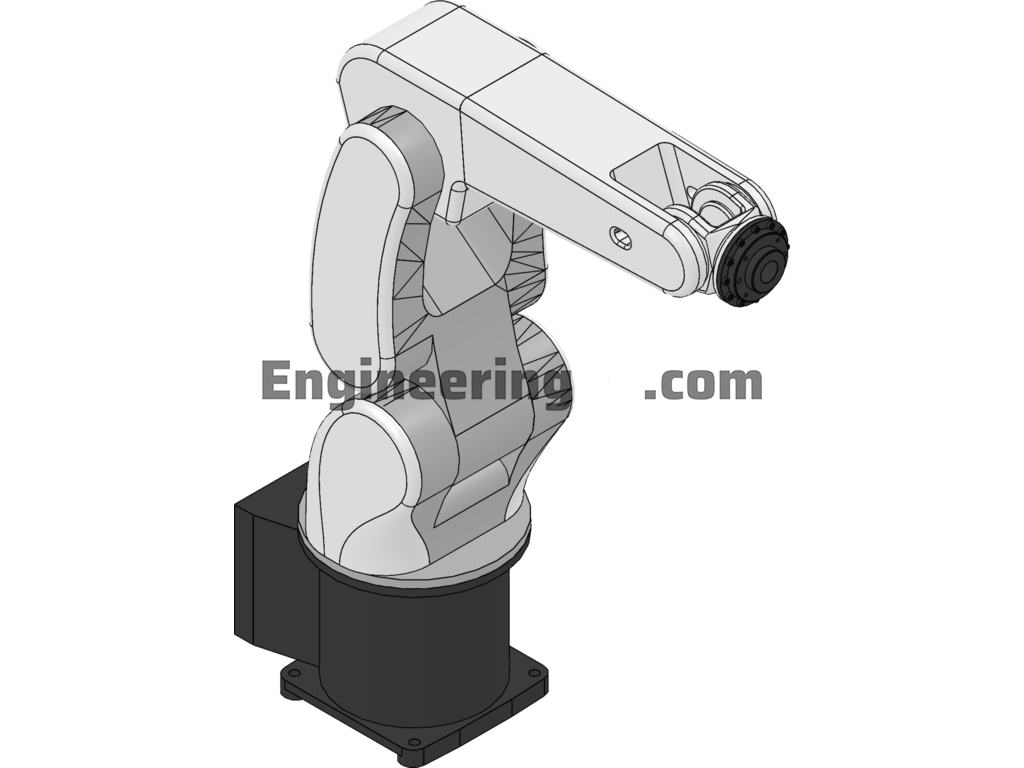

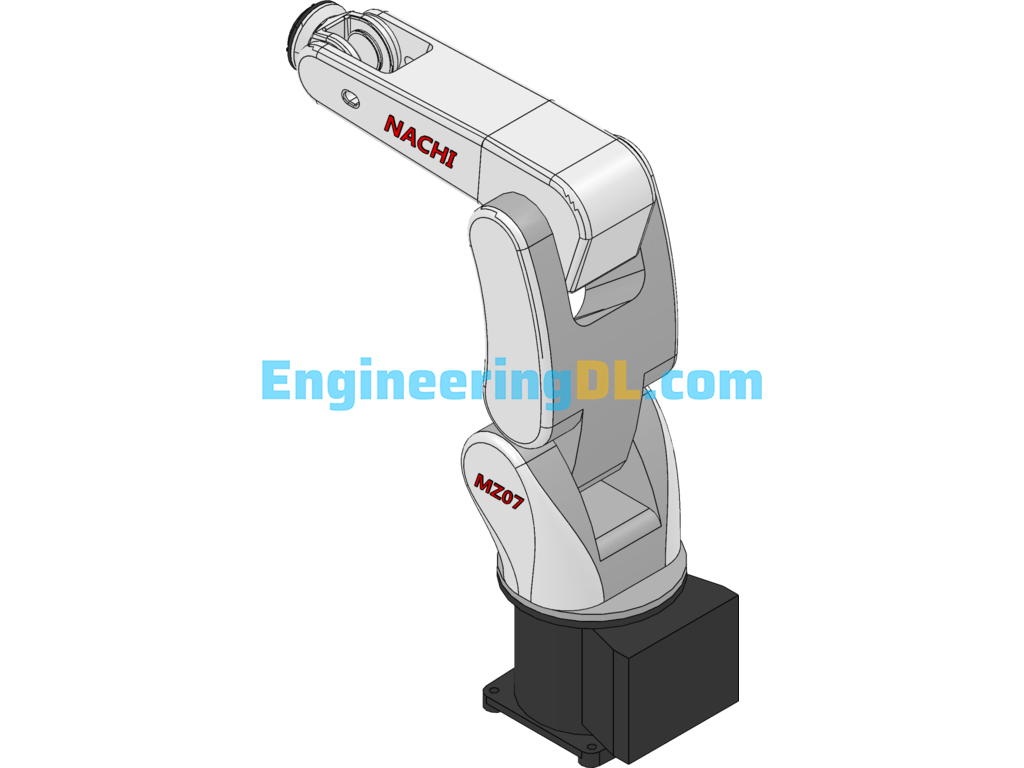
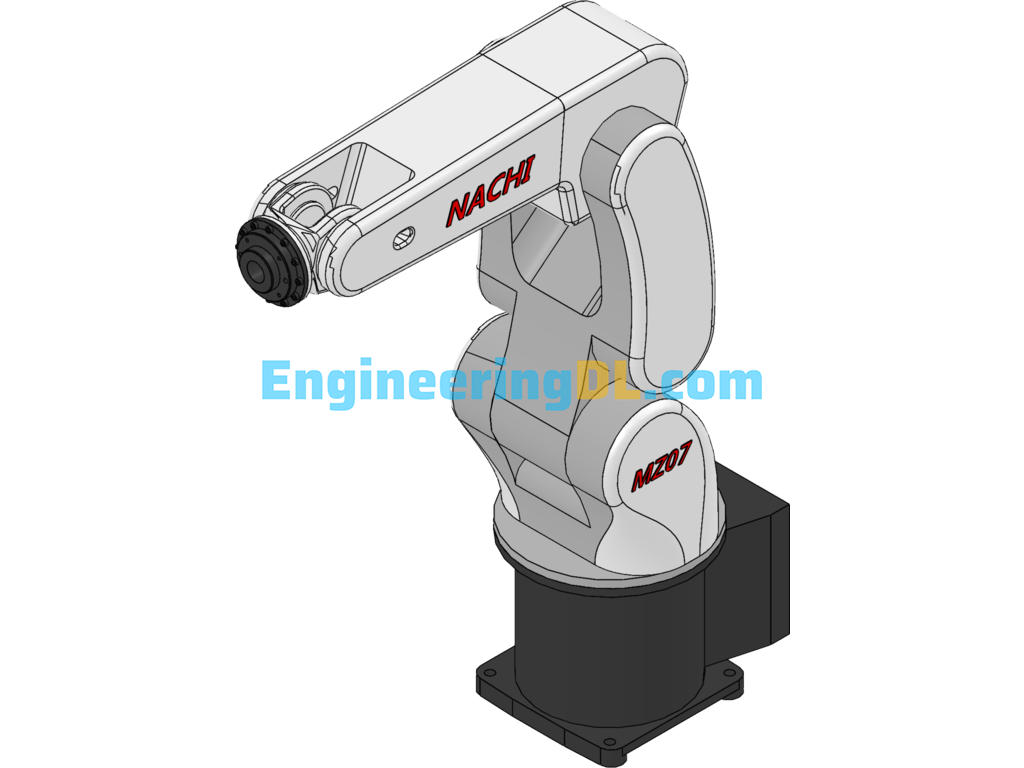
The NACHI MZ07 is a simple and sophisticated robot with a unique modeling of each joint and is movable, and the NACHI MZ07 robot can work as fast as 0.3 seconds per beat, with a repeatable positioning accuracy of 0.02mm and a payload of 7KG, and is suitable for automated work such as handling, palletizing, grinding and dispensing.
Specification
Robot Model MZ07-01
(MZ07P-01) MZ07L-01
(MZ07LP-01) MZ03EL-01
Structure Joint type
Number of joints 6(5) 6
Drive type AC servo type
Max.
Operating range Arm J1 Rotation ??2.97rad (??170??)
J2 Back and forth -2.36 ~ +1.40rad (-135????? +80??)
J3 Up and down -2.37 ~ +4.71rad (-136????? -270??) -2.43 ~ +4.71rad (-139????? -270??) -2.71 ~ +4.71rad
(-155????? -270??) 155????? -270??)
Wrist J4*3 Rotation2 ??3.32rad (??190??)
J5 Bending ??2.09rad (??120??)
J6 Rotation1 ??6.28rad (??360??)
Maximum speed Arm J1 Rotation 7.85rad/s (450??/s) 5.24rad/s (300??/s)
J2 Back and forth 6.63rad/s (380??/s) 4.89rad/s (280??/s) 4.01rad/s (230??/s)
J3 Up and down 9.08rad/s (520??/s) 6.28rad/s ( 360??/s)
Wrist J4*3 Rotation2 9.60rad/s (550??/s)
J5 Bending 9.60rad/s (550??/s)
J6 Rotation1 17.5rad/s (1000??/s)
Moveable mass Wrist 7kg 3.5kg
Allowable wrist
Static load torque J4*3 Rotation2 16.6N-m 6.
0N-mJ5 Bending 16.6N-m 6.
0N-mJ6 Rotation1 9.4N-m 2.9N-m
Wrist tolerance
Moment of inertia*1 J4*3 Rotation2 0.47kg-m2 0.
12kg-m2J5 Bending 0.47kg-m2 0.
12kg-m2J6 Rotation1 0.15kg-m2 0.03kg-m2
Position repetition accuracy *2 ??0.02mm ??0.03mm
Ambient temperature 0???45??C
Setting conditions Ground mounting, Wall mounting, Suspension mounting, Tilt mounting
Body mass 30kg 32kg 39kg
Maximum working radius 723mm 912mm 1102mm
Environmental resistance IP67 (dust and drip-proof)
Specification: Robots, Robots SolidWorks
|
User Reviews
Be the first to review “Robots, Robots SolidWorks”
You must be logged in to post a review.

There are no reviews yet.