Mir200 AGV Trolley SolidWorks, 3D Exported
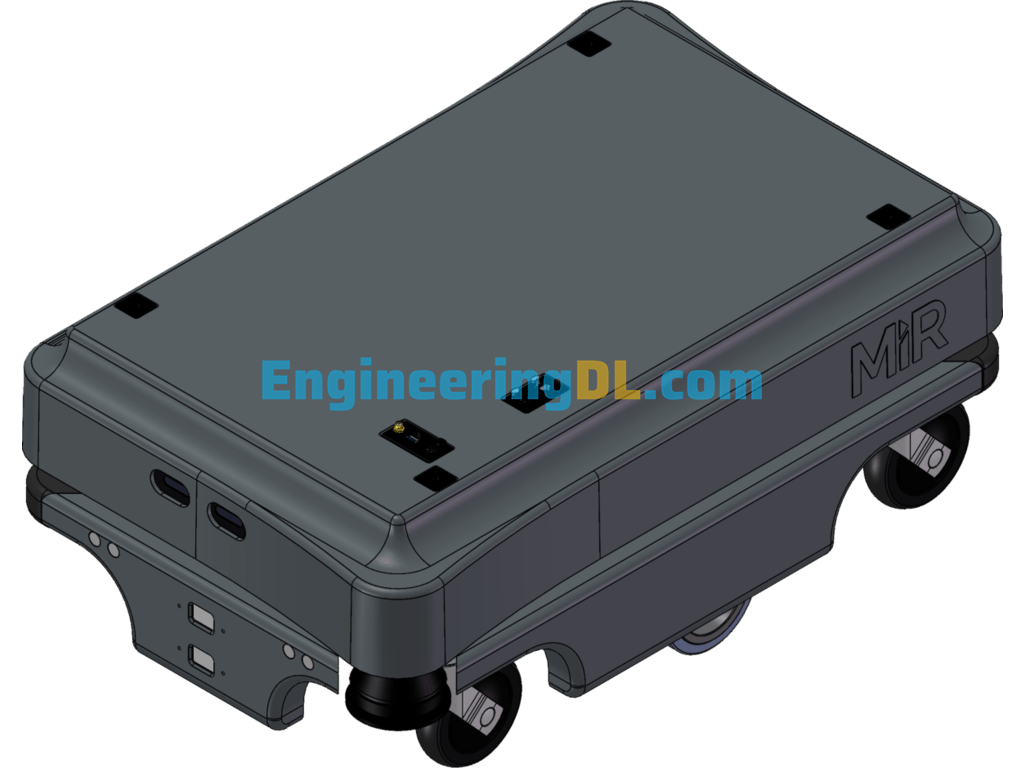




SpecificationsDesigned use Mobile robot for transport tasks within industry, logistics and
healthcareDimensionsLength 890
mmWidth 580
mmHeight 352
mmWeight (without load) 62.5
kgLoad surface 600 x 800
mmColor RAL
7011PayloadRobot payload 200 kg (maximum 5% incline)
Towing capacity 500 kg (see Separate MiRHook 200 data sheet)
Speed and
performanceRunning time 10 hours or 15
kmMaximum speed Forwards: 1.1 m/s (4 km/h) / backwards: 0.3 m/s (1 km/h)
Turning radius 520 mm (around center of robot)
Positioning accuracy +/-50 mm of position, +/-10 mm to docking
markerTraversable gap and sill tolerance 20
mmPowerBattery Li-NMC, 24 V, 40 Ah; charging time: up to 3 hours (0-80%: 2 hours)
Internal charger Input: 100-230 V ac, 50-60 Hz / Output: 24 V, max 15
AEnvironmentAmbient temperature range +5??C to 50??C (humidity 10-95% non-condensing)
IP class IP
20CommunicationWiFi Dual-band wireless
AC/G/N/BBluetooth 4.0 LE, range: 10-20
mI/Os USB and
EthernetSafety
sensorsSICK laser scanners S300 (2 pcs.) 360?? visual protection around
robot3D camera Intel RealSense??? Detection of objects Detection of objects ahead 50-500 mm above
floorUltrasonic scanners (4 pcs.) Detection of transparent objects ahead, e.g. glass
doorsSafety compliance and approvals EN 1525, PLd cat. 3, ESD approved and CE
certifiedTop
moduleMax. height from floor to top 1800
mmCenter of gravity Lower than 900 mm above the floor
Specification: Mir200 AGV Trolley SolidWorks, 3D Exported
|
User Reviews
Be the first to review “Mir200 AGV Trolley SolidWorks, 3D Exported”
You must be logged in to post a review.

There are no reviews yet.