Climbing Robot SolidWorks, AutoCAD
This work intends to use the research can climb and can automatically pick the trunk of the high-altitude fruit picking machine, the use of which can stand on the ground to accurately and quickly pick the fruit of any part of the tree branches, fruit farmers no longer need to climb up and down the tree with a ladder to pick fruit, not only to reduce the labor intensity of picking out to improve the speed of picking, but also to avoid the danger of picking fruit climbing trees.
When climbing upward.
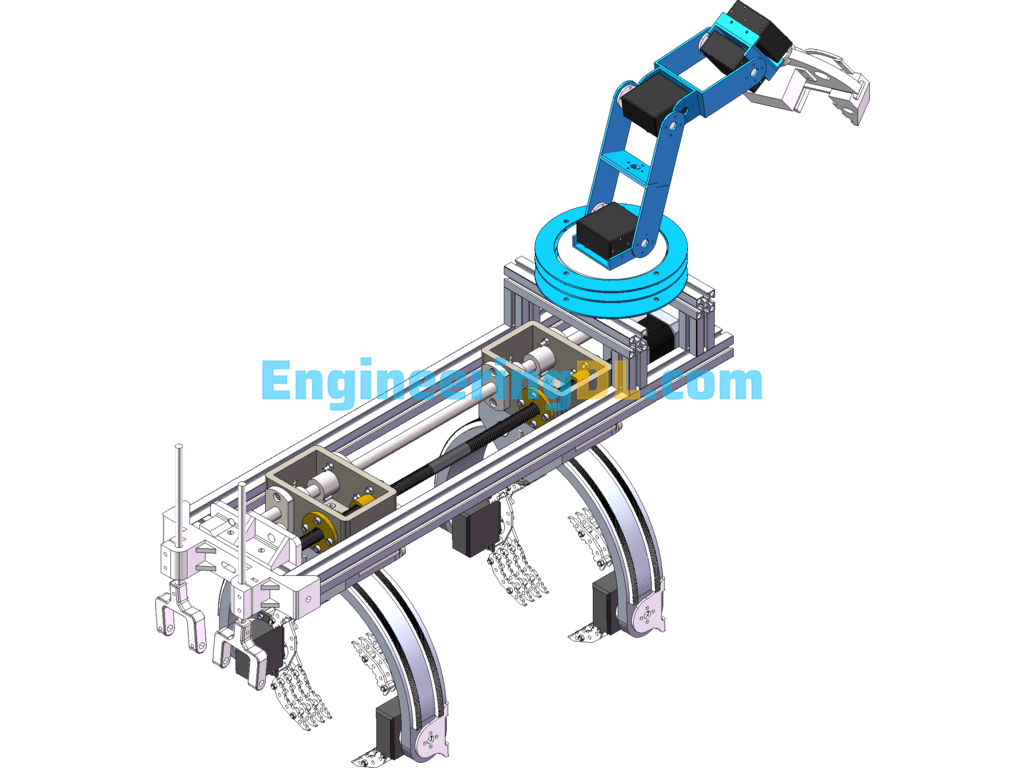
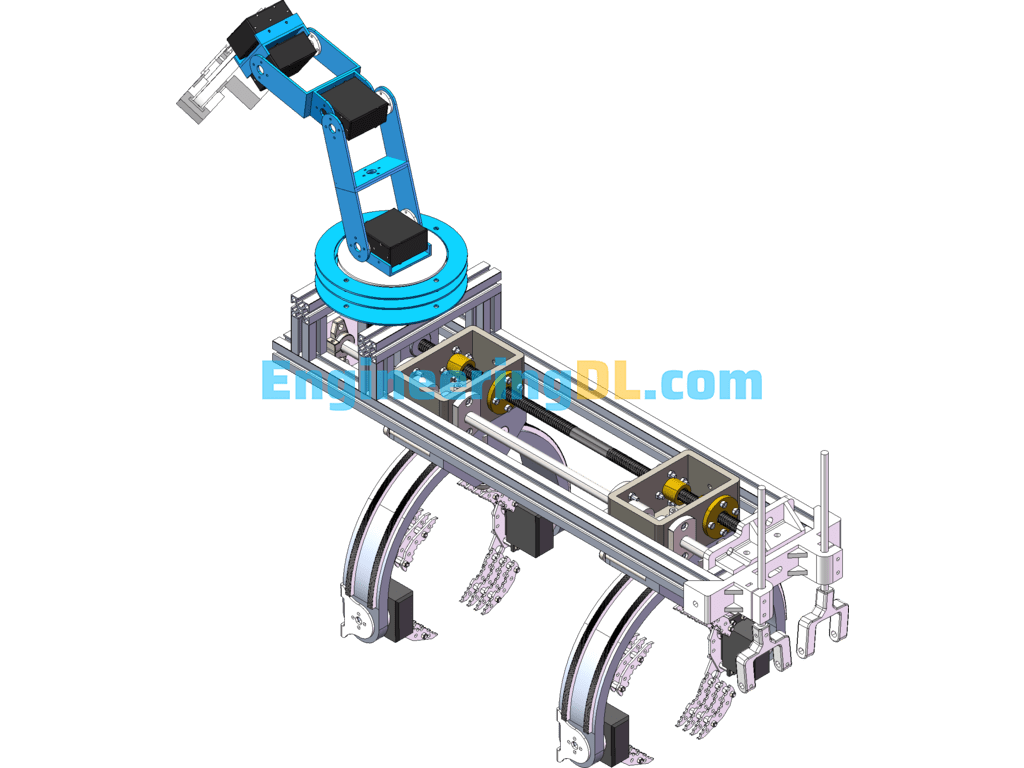
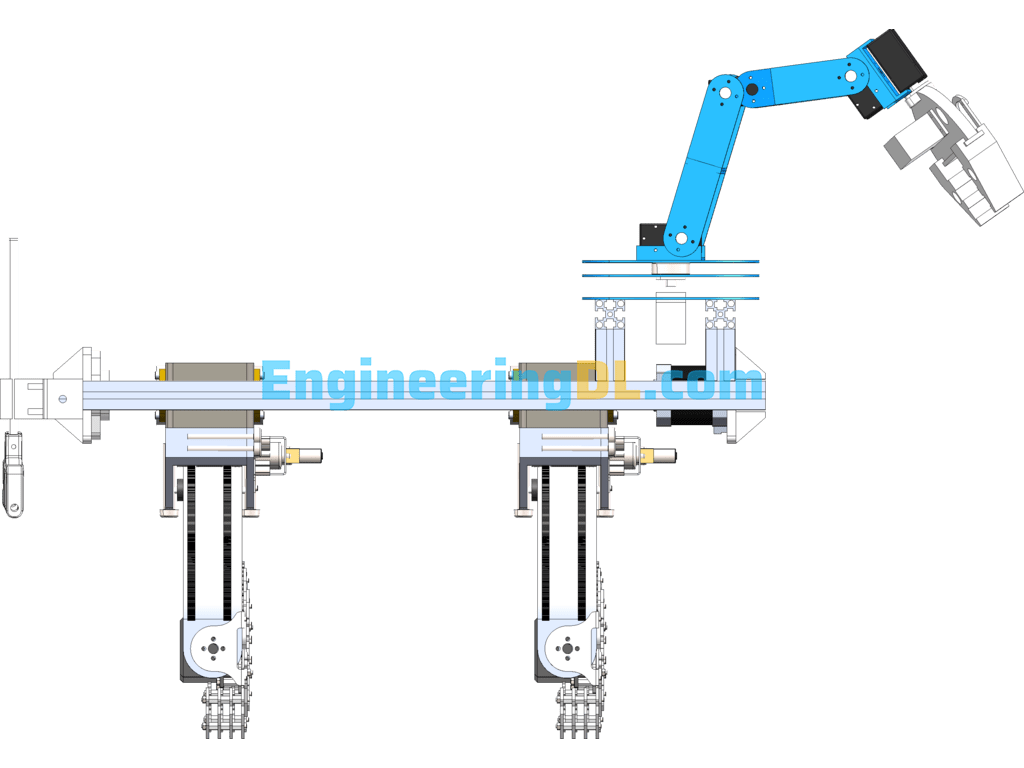
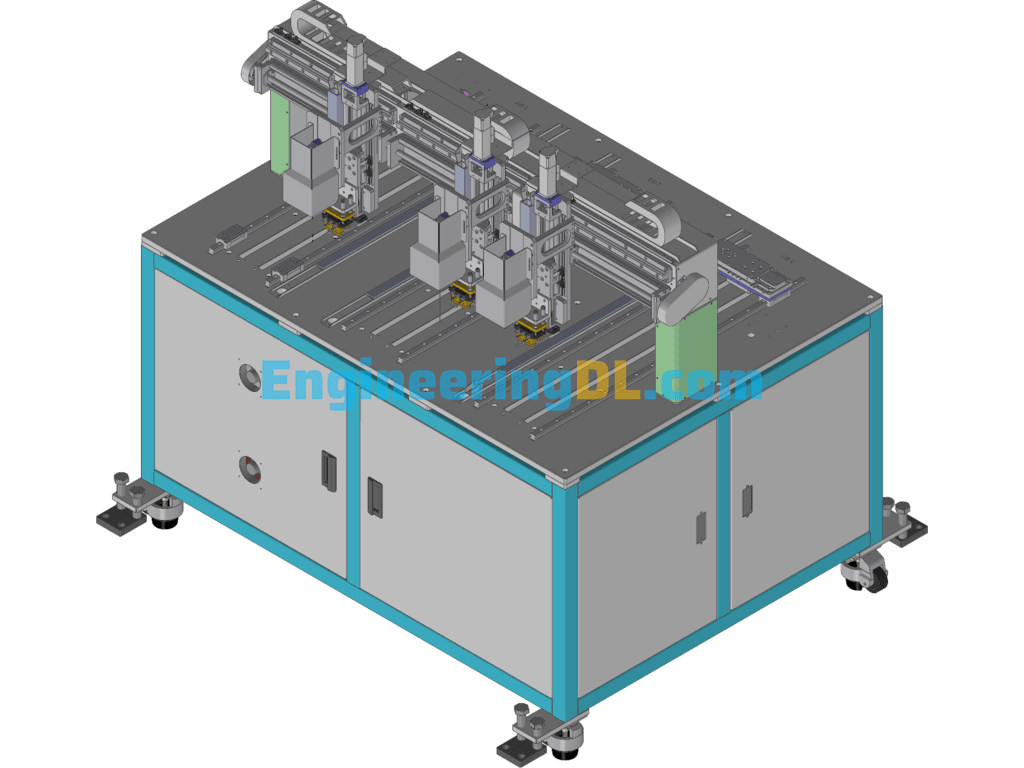
1. the upper clamping mechanism through the mechanical claw clamping climbing objects.
2. the telescopic mechanism servo motor drives the positive and negative tooth screw to make the multi-functional platform of the upper and lower clamping mechanism on the screw light bar guide to telescopic movement.
3. lower clamping mechanism through the mechanical claws to release the climbing object, upward contraction.
Repeatedly through the above steps so as to complete the climbing action.
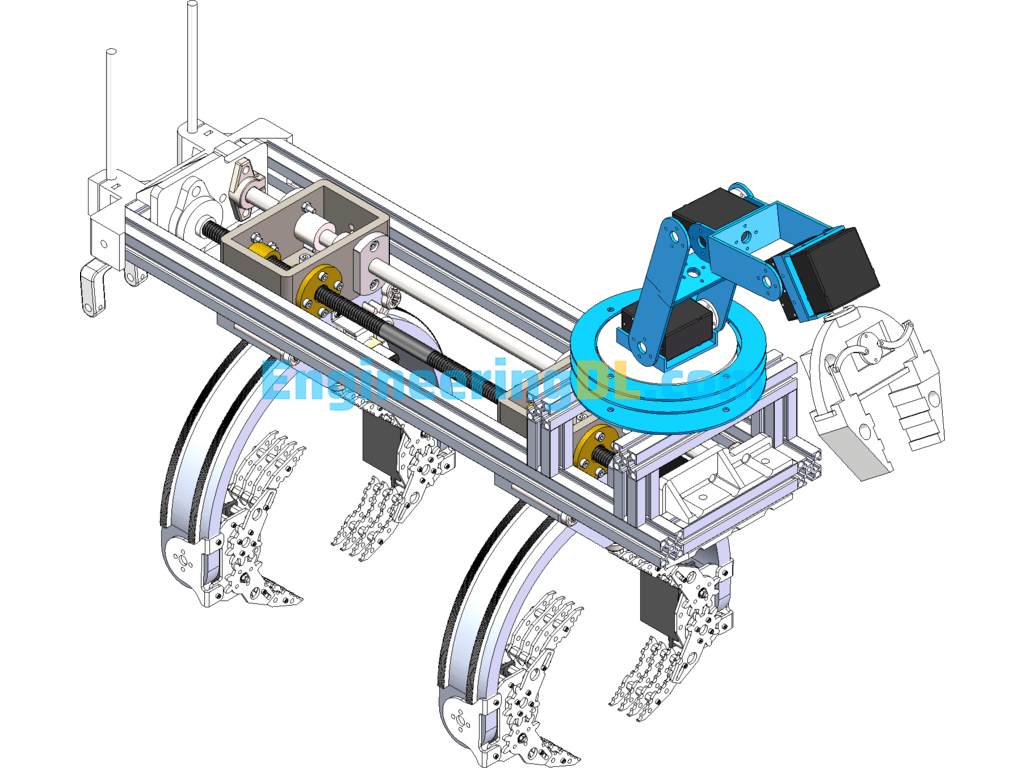
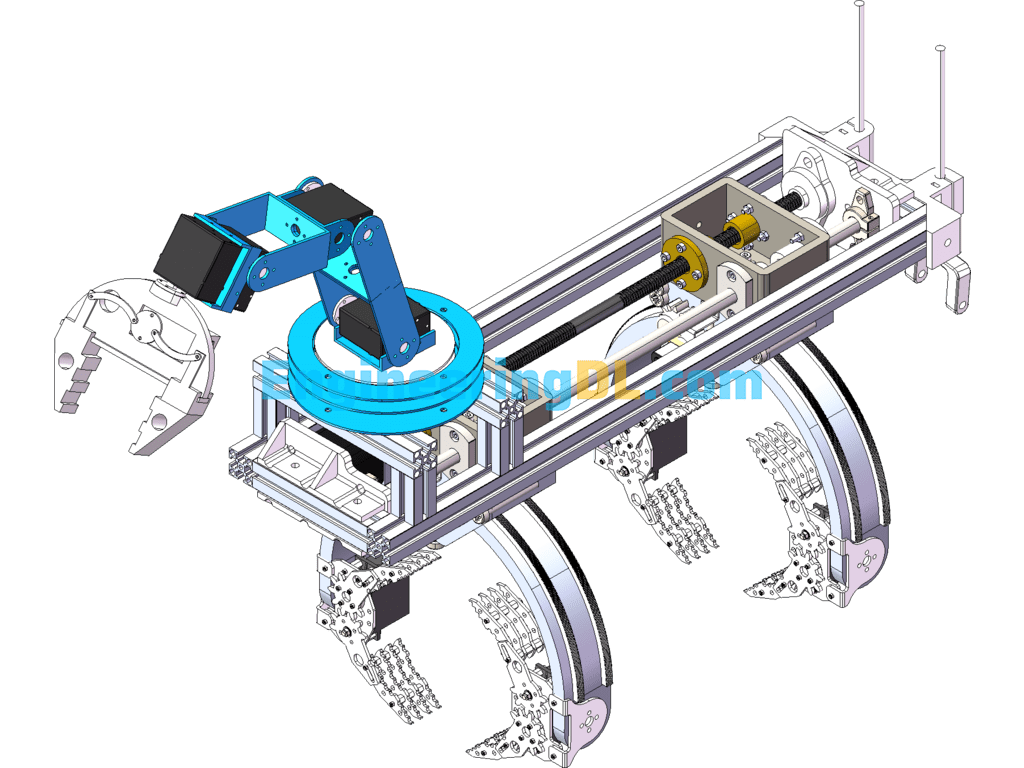
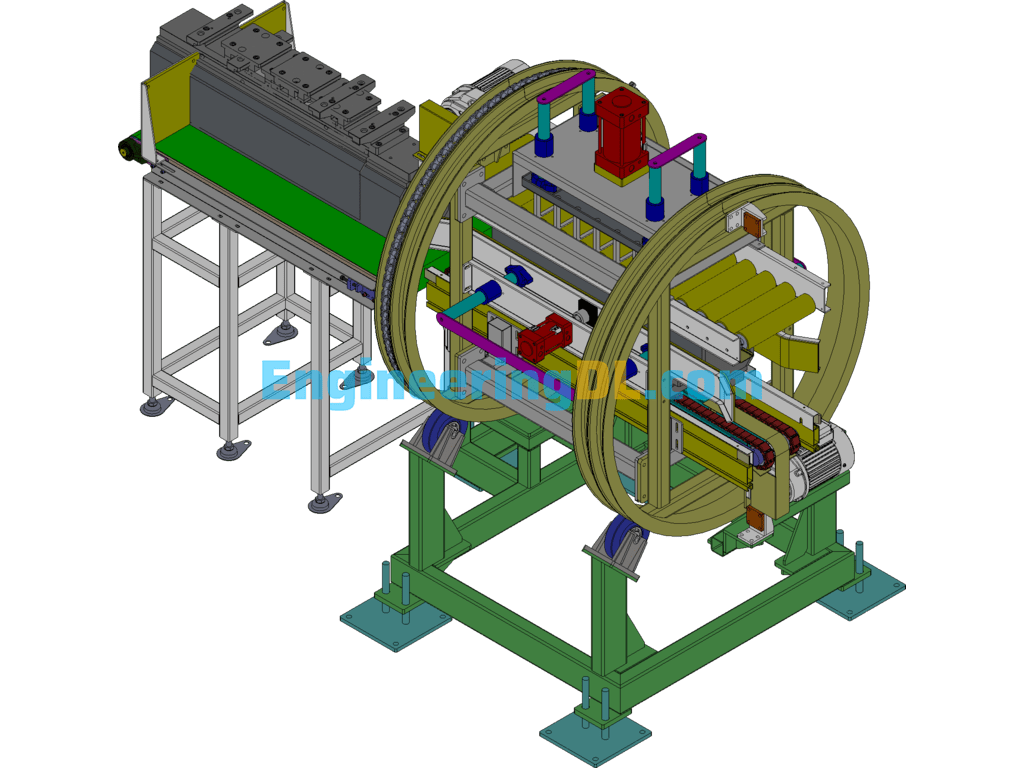
Avoid fork movement: through the upper and lower clamping mechanism on the reducer motor drives the rubber covered roller and synchronous wheel rotation so as to drive the synchronous belt movement on the arc slide, so the arc slide does rotating circular movement to avoid obstacles.
When picking: Connect the fixed support on the upper side of this platform, carry the mechanical arm and other parts on the fixed support, and stand on the ground to operate so that the robot can pick accurately in any part.
1) The biggest highlight of this product is the fork avoidance mechanism, through the servo motor drive can make the clamping mechanism around the climbing body rotation, so as to effectively avoid the obstacles on the climbed body (such as tree branches) so that the multi-functional tree climbing picking platform can flexibly respond to a variety of irregular fruit tree problems.
(2) to avoid the climbing of the fruit and picking damage to the fruit.
3) The structure is ingenious and simple, with stable climbing performance and good safety performance.
Specification: Climbing Robot SolidWorks, AutoCAD
|
User Reviews
Be the first to review “Climbing Robot SolidWorks, AutoCAD”
You must be logged in to post a review.

There are no reviews yet.