A Kind Of Pneumatic Cavity Tray Seedling High Speed Transplanting Machinery Claw SolidWorks, AutoCAD
Own previously designed invention
[0001]The present invention belongs to the field of agricultural machinery, designing a pneumatic type mechanical claw for high speed transplanting of cavity tray seedlings, which is mainly used as the end actuator of high speed transplanting machine in greenhouse greenhouses for clamping cavity tray seedlings.
Technical Background
[0002] Most modern agricultural greenhouse greenhouse seedlings are raised in cavity trays, which can effectively improve the survival rate of seedlings as well as the economic benefits of seedlings and shorten the time of seedlings. Because of these advantages of cavity tray seedlings, making it easy to standardize the operation, you can use machine sowing, suitable for a large number of factory seedlings, labor-saving, labor-saving, high efficiency, China’s current factory seedlings are using cavity tray seedlings. Cave pot seedling transplanting of large areas, using the traditional manual transplanting method, the working environment is harsh, low efficiency, high cost, the advantages of convenient seedling will be covered up, limiting the development of cave pot seedling so need cave pot seedling high-speed transplanter to help greenhouse greenhouse cave pot seedling high-speed transplanting. The use of high-speed transplanter startling rows of cavity tray seedling transplanting can improve the labor environment and facilitate manual operation. You can sit in the lounge of the greenhouse, put the cavity tray on the operating table, and use the machine to finish transplanting comfortably and conveniently.
[0003] With the development of science and technology and the improvement of people’s living standards, automation of facility agriculture production has become an inevitable trend in the development of modern agriculture. Among them, the automation technology of transplanting operation is one of the key technologies for the automation of facility agriculture production. The transplanting robot is the key equipment to realize the automatic transplanting of seedling trays, and the transplanting robot’s claw is an important part that comes into direct contact with seedlings, and its performance directly affects the quality of transplanting. Therefore, the development of stable and efficient transplanting mechanical claws is of great significance to improve the survival rate of transplanting robot and the efficient operation of transplanting machine.
[0004] The purpose of the present invention is to provide a high-speed transplanting mechanical claw, which is driven by a cylinder and electromagnetic actuator, with precise driving control and fast working speed, and can accurately and quickly complete the grasping and releasing action of seedlings, in response to the shortcomings of the prior art.
[0005] The purpose of the present invention is achieved by the following technical solution: a high-speed transplanting mechanical claw, comprising a main frame, a cylinder 1, an electromagnetic pusher 5, and a grasping mechanism; said pusher part of the cylinder 1 is fixed on an upper fixing plate; said electromagnetic pusher 5 is fixed on a lower fixing plate in the main frame, and said mechanical claw mounting bracket is fixed on the main frame.
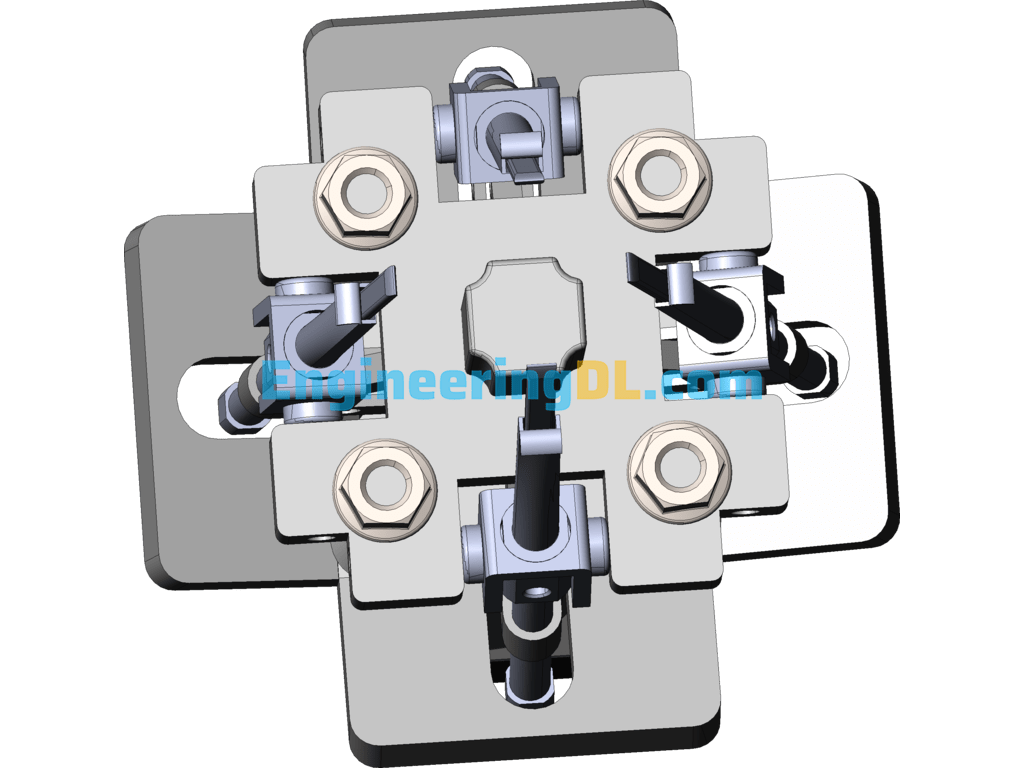
[0006] Said main frame is of upper and lower frame structure, divided into upper fixed limit 2 plate, upper and lower limit plate connecting bolts 8, lower fixed limit plate 4, bolts, nuts and other components. The upper fixed limit plate 2 is fixedly connected to the cylinder push rod 10. The upper limit plate 2 and lower limit plate 4 are fastened by bolts and nuts through the upper and lower limit plate connecting bolts 8. The lower limit plate 4 is fixed to the electromagnetic actuator 5 and is hinged to the four surrounding small cylinders 3 by the small cylinder swing connector 9.
[0007] Said grasping mechanism consists of six parts, divided into electromagnetic push rod 4, small cylinder swing connection 9, piece 9 rod and piece 12 of the connecting rod 15, small cylinder 3, plate steel pin sleeve 7, plate steel pin 6 composition.
[0008] Further, the electromagnetic push rod 5 is hinged to the connecting rod 15 of the piece 9 rod to the piece 12, and the small cylinder swing connection 9 is fixed at the small cylinder 3, thereby driving the small cylinder 3 to swing around the frame and drive the plate steel needle 6. The plate shaped steel needle sleeve 7 is set on the plate shaped steel needle 6 to facilitate disengaging the plate shaped steel needle 6 when the transplanting of the transplanted seedling is completed.
[0010] The present invention has a beneficial effect: the overall size of the transplanting mechanical claw of the present invention is small, and the grasping is accurate and rapid. Pneumatic cylinder 1 can accurately and quickly output the distance, so as to accurately and quickly drive the frame to the designated position and improve the working speed. The electromagnetic actuator 5 controls the clamping action, which can control the force of the plate-shaped steel needle 6 on the transplanting object to better protect the transplanting object and is more conducive to high-speed transplanting. At the same time the plate shaped steel needle 6 opening size can be controlled by signal, so that the mechanical claw can be applied to different types of seedling tray.
Description of the accompanying drawings
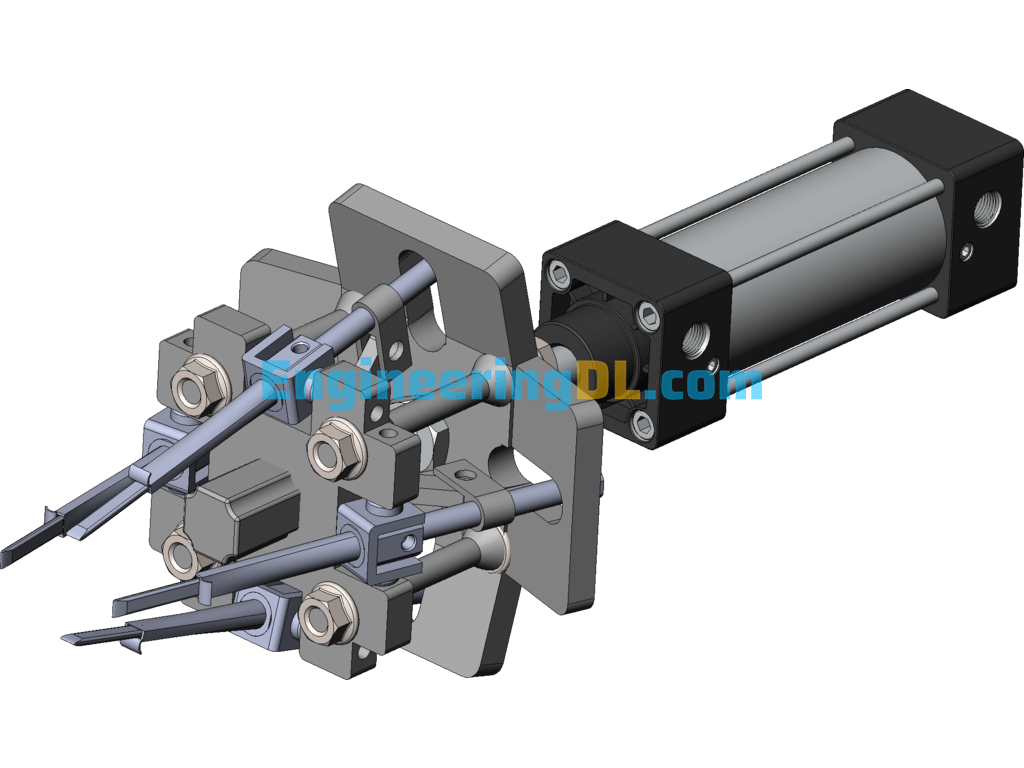
[0011] Fig. 1 is a front view of the mechanical claw
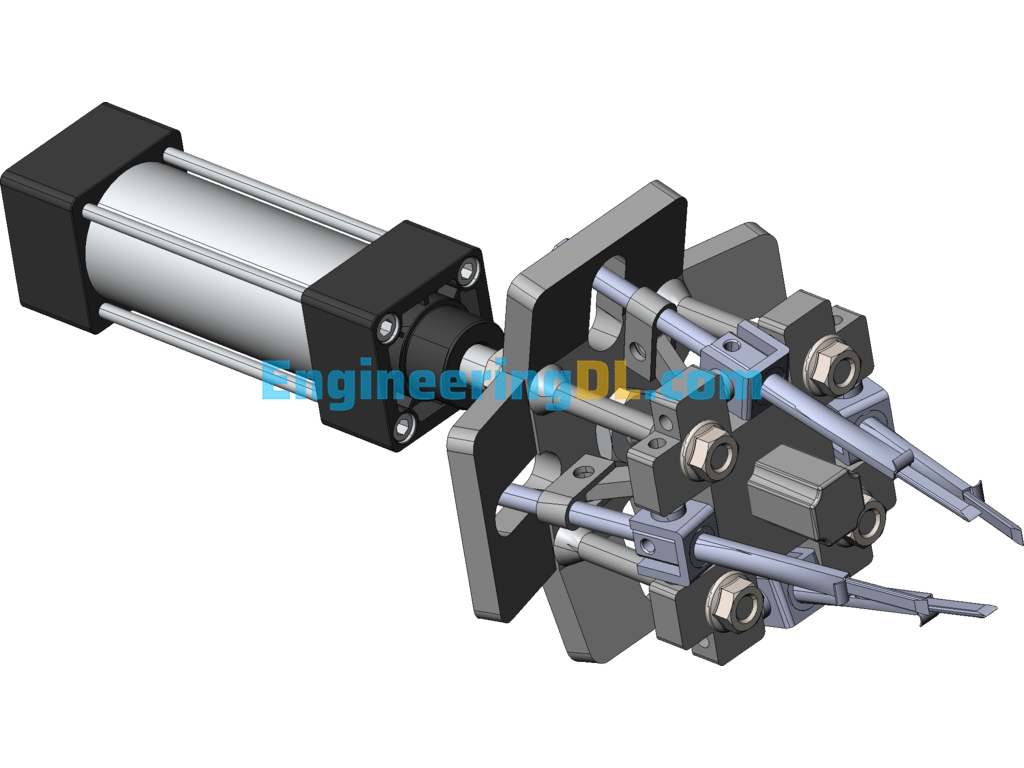
[0012] Fig. 2 is a partial view of the mechanical claw
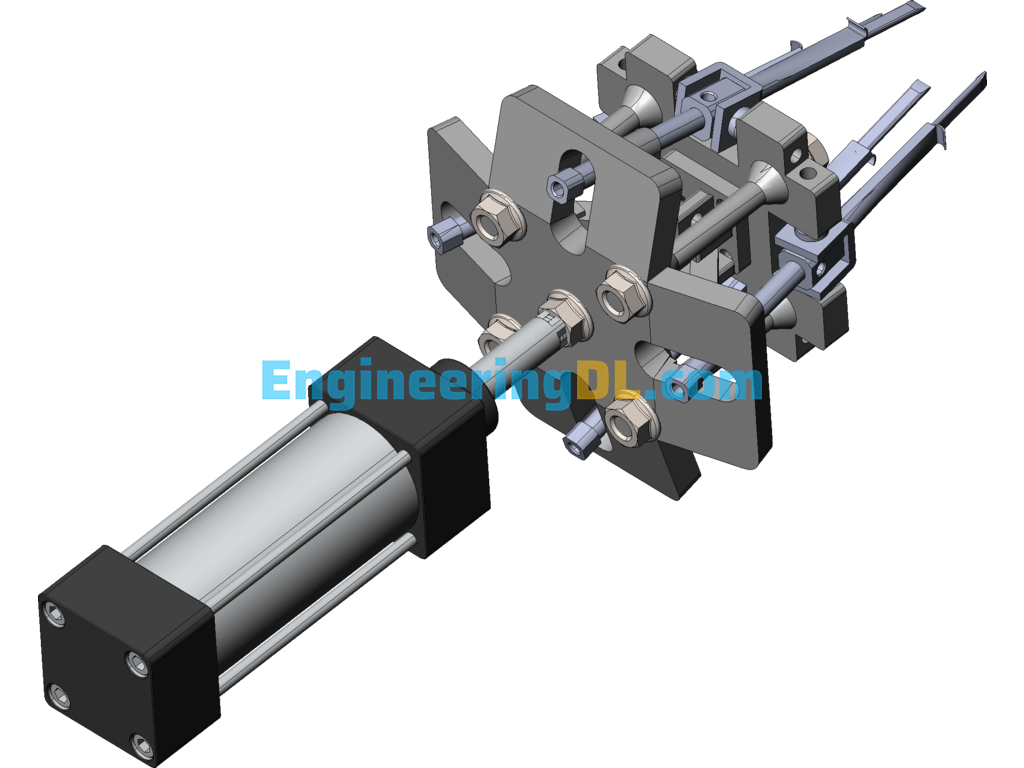
[0013] Fig. 3 is an axonometric view of the mechanical claw [
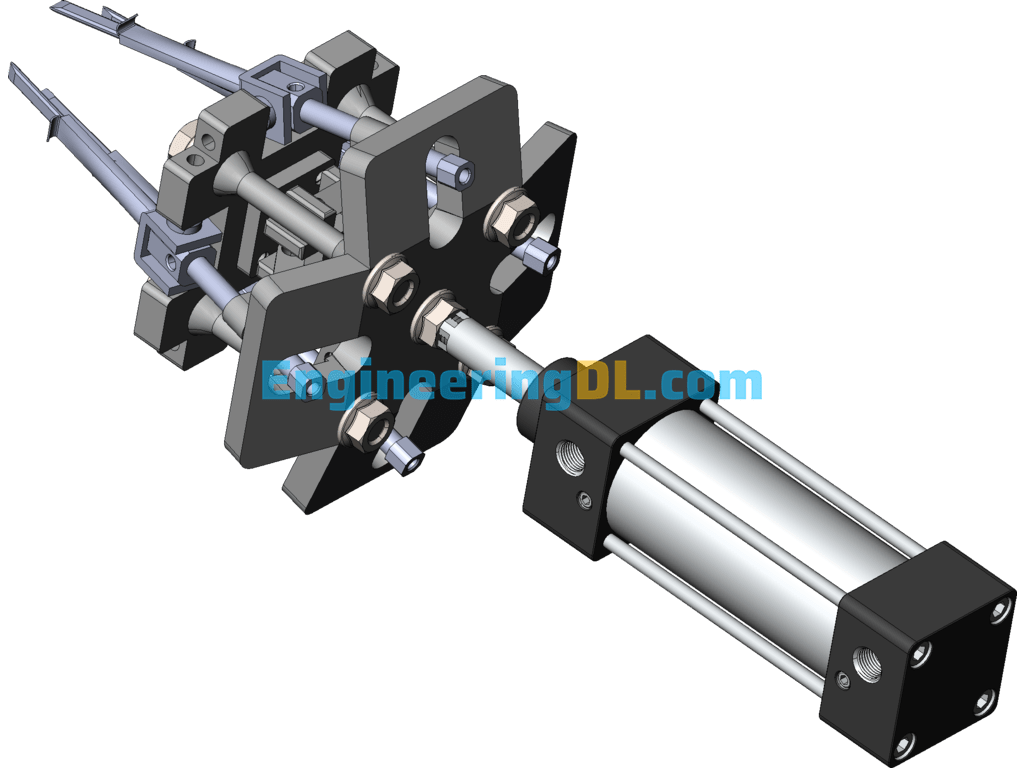
0014] Fig. 4 is an attempt to the bottom of the mechanical claw
[0015] In the drawings, the cylinder 1, upper fixed limit plate 2, small cylinder 3, lower limit fixed plate 4, electromagnetic push rod 5, plate steel needle 6, plate steel needle sleeve 7, upper and lower limit plate connection bolt 8, small cylinder swing connection 9, cylinder push rod 10, electromagnetic push rod top connection 12, small cylinder and lower limit plate U-shaped connection 14, piece 9 rod and piece 12 connection rod 15 and a number of pin connections.
Specific Implementation
[0016] The mechanical claw is further specified below in conjunction with the accompanying drawings.
[0017]As shown in FIGS. 1 and 3, the present invention comprises a main cylinder 1, an upper fixed limit plate 2, a small cylinder 3, a lower limit fixed plate 4, an electromagnetic push rod 5, a plate steel pin 6, a plate steel pin sleeve 7, an upper and lower limit plate connecting bolt 8, a small cylinder swing connection 9, a cylinder push rod 10, an electromagnetic push rod top connection 12, a U-shaped connection 14 between the small cylinder and the lower limit plate, a piece 9 rod and a piece 12 The cylinder pusher 10 is connected to the upper fixed limit plate 2 by threaded nut, the upper and lower fixed limit plates 2 and 4 are connected by four connecting bolts 8 in the middle, the swing connector 9 and 15 are connected to the small cylinder 3, and the four small cylinders are in the limit slot of the upper limit plate 2. push rod 5 is located in the middle of the bottom surface of the lower limit plate 4, the plate steel needle 6 is located in the plate steel needle sleeve 7, and the steel needle 6 is connected to the telescopic push rod of the small cylinder.
[0018] Said, small cylinder 3, small cylinder swing connection 9, electromagnetic pusher top connection 12 and connection rod 15 constitute a hinged pendulum mechanism, and the swing of small cylinder 3 is realized by driving of electromagnetic pusher 5, which in turn realizes the angular swing of the mechanism plate steel needle 6, facilitating the insertion of the soil at a suitable angle for the grasping of the cavity seedlings.
[0019] Said small cylinder 3 is hinged to the lower limit fixing plate 4 by the small cylinder with the lower limit plate U-shaped connector 14, which realizes the small cylinder swinging around the axis.
Said plate shaped steel needle sleeve 7 in the bottom has an outwardly bending plate 11, in transplants transplanted plate shaped steel needle 6 contracted back when pressing transplants, to prevent the retraction of the plate shaped steel needle 6 to bring out the cavity tray transplants.
[0020]As shown in the figure, the four plate shaped steel needle 6 shows a cross distribution, when transplanting seedlings, due to the upper fixed limit plate 2 limit slot hole and the role of the lower limit fixed plate 4 makes the angle of insertion into the cavity seedling about 15 degrees angle, so that it is easy to take seedlings.
[0021] The working process of the invention is as follows
[0022] mechanical transplanting claw work, located above the cavity seedlings to be transplanted, through the action of the cylinder 1 makes the transplanting claw into the appropriate height; in this process the control signal control electromagnetic push rod 5 work, so that the mechanical transplanting claw open to prevent damage to the cavity seedlings mechanical claw during the descent; after reaching the designated position, the electromagnetic push rod 5 contraction makes mechanical claw claws closed, because the upper and lower limit plate limit role, so that the plate shaped steel needle 6 at a suitable angle to transplant the soil matrix of the cavity seedlings; then four small cylinders 3 at the same time, push four plate shaped steel needle into the soil with the action of the cylinder 1, retracted upward to remove the cavity seedlings from the cavity tray; to transplant claws moved to the transplant position, cylinder 1 again downward to extend the transplanted seedlings into the soil matrix to be transplanted;. Then four small cylinders 3 action makes the plate shaped steel needle 6 retracted, retracted cylinder 1 of the beginning of the contraction, the mechanical claw up, transplanting process is complete, start the next round of transplanting process.
Specification: A Kind Of Pneumatic Cavity Tray Seedling High Speed Transplanting Machinery Claw SolidWorks, AutoCAD
|
User Reviews
Be the first to review “A Kind Of Pneumatic Cavity Tray Seedling High Speed Transplanting Machinery Claw SolidWorks, AutoCAD”
You must be logged in to post a review.

There are no reviews yet.