Multifunctional Machine Holding Device Design (Vacuum Suction + Parallel Clamping + Site-Selected Ground Rail) 3D Exported
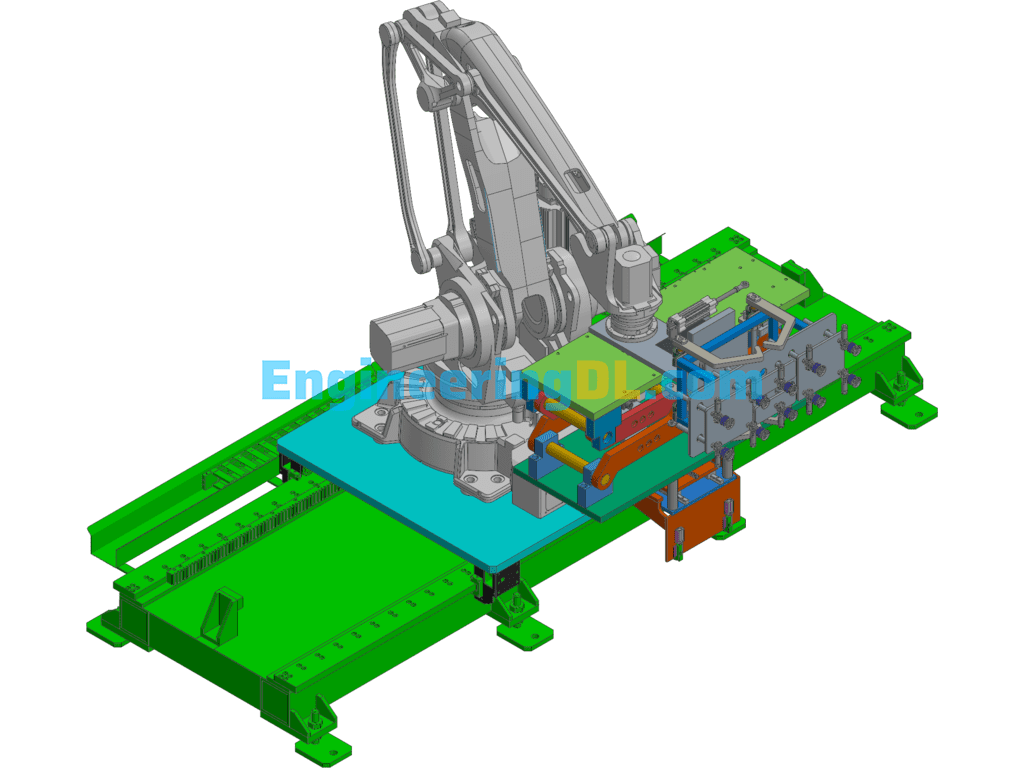
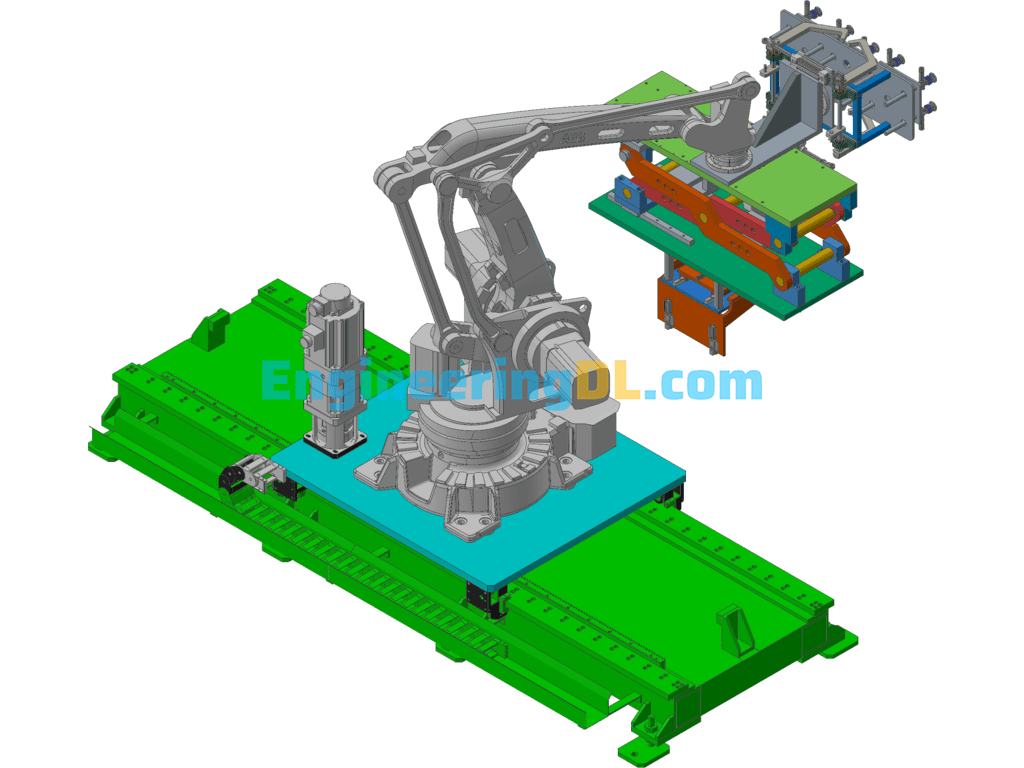
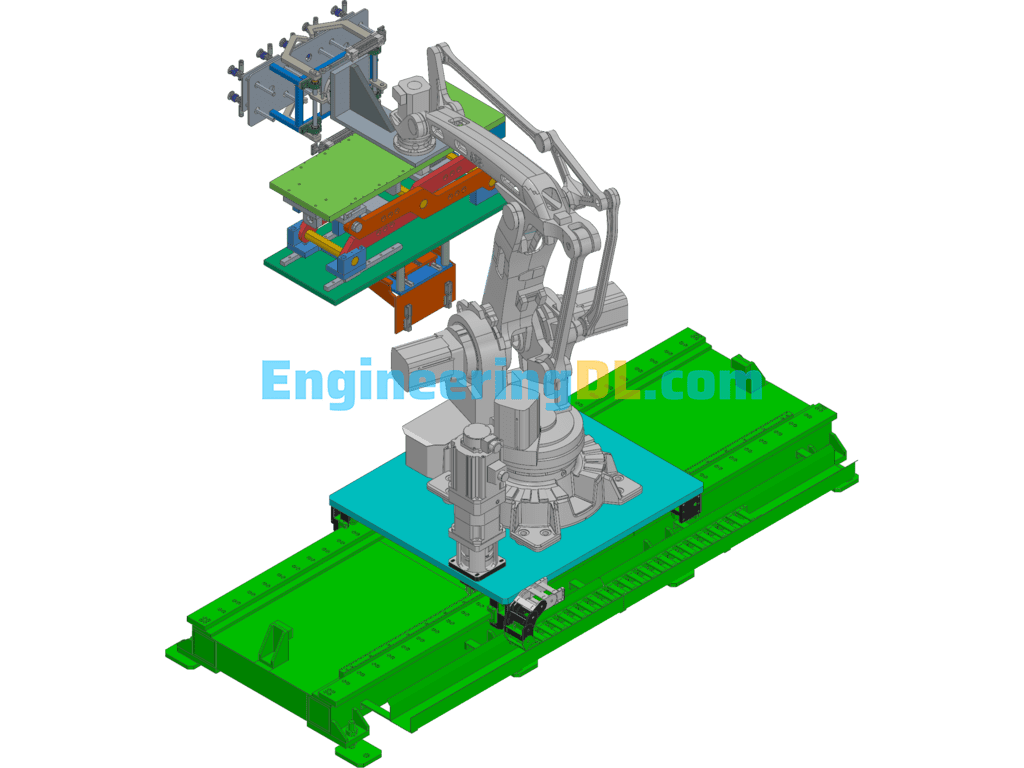
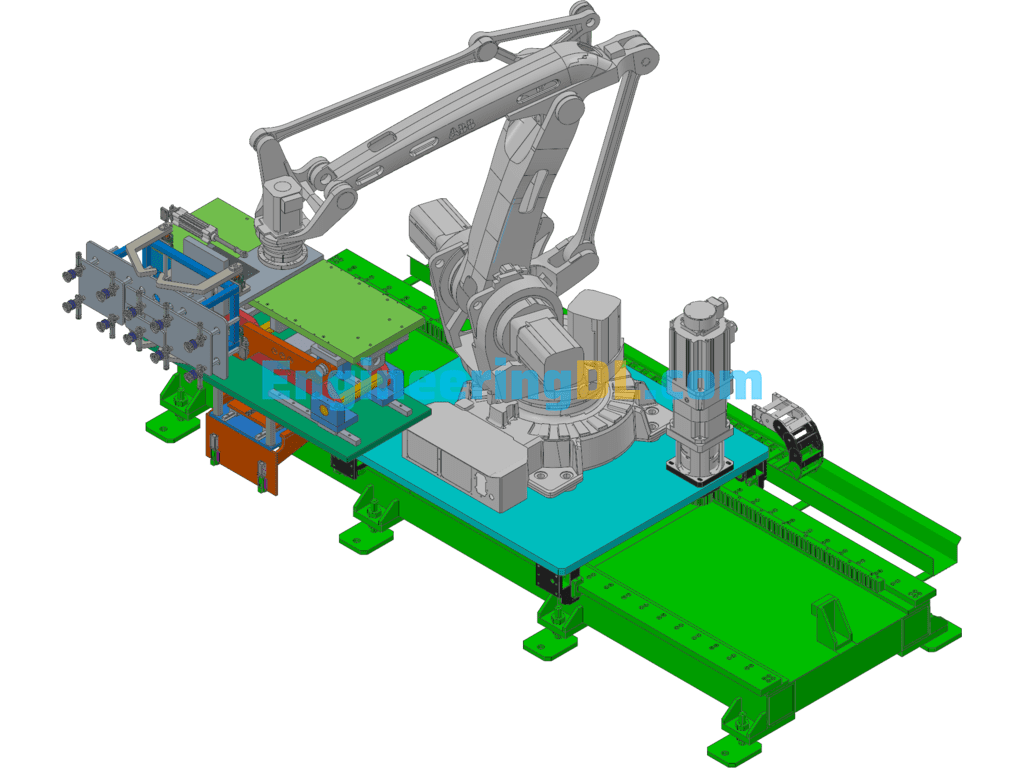
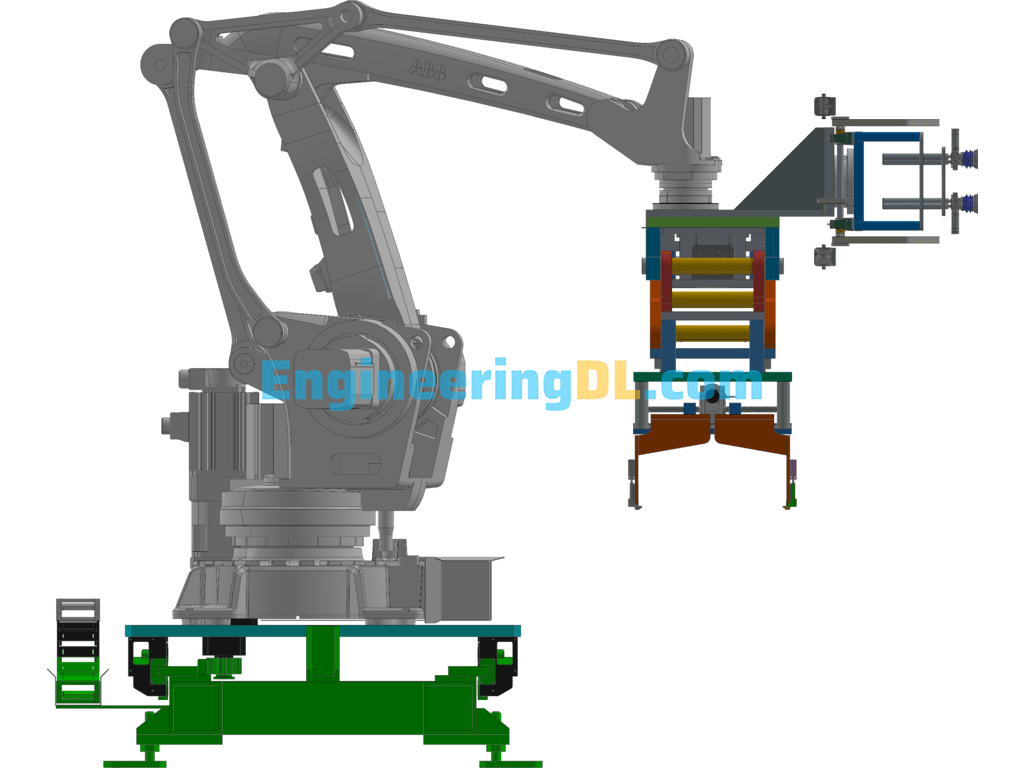
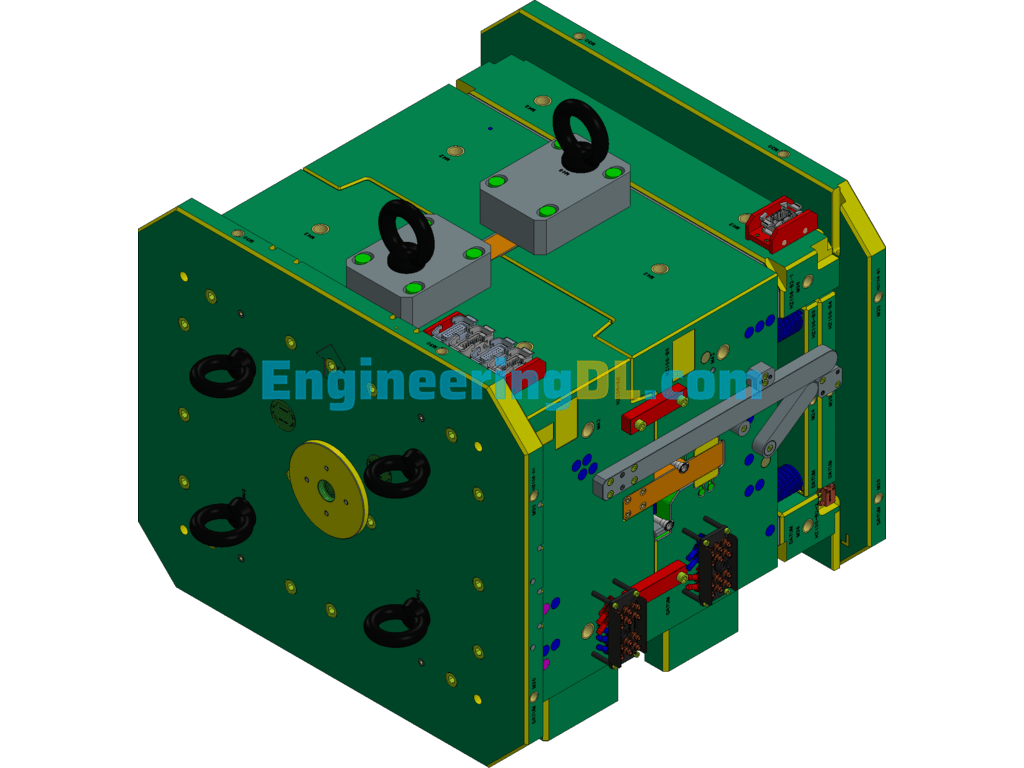
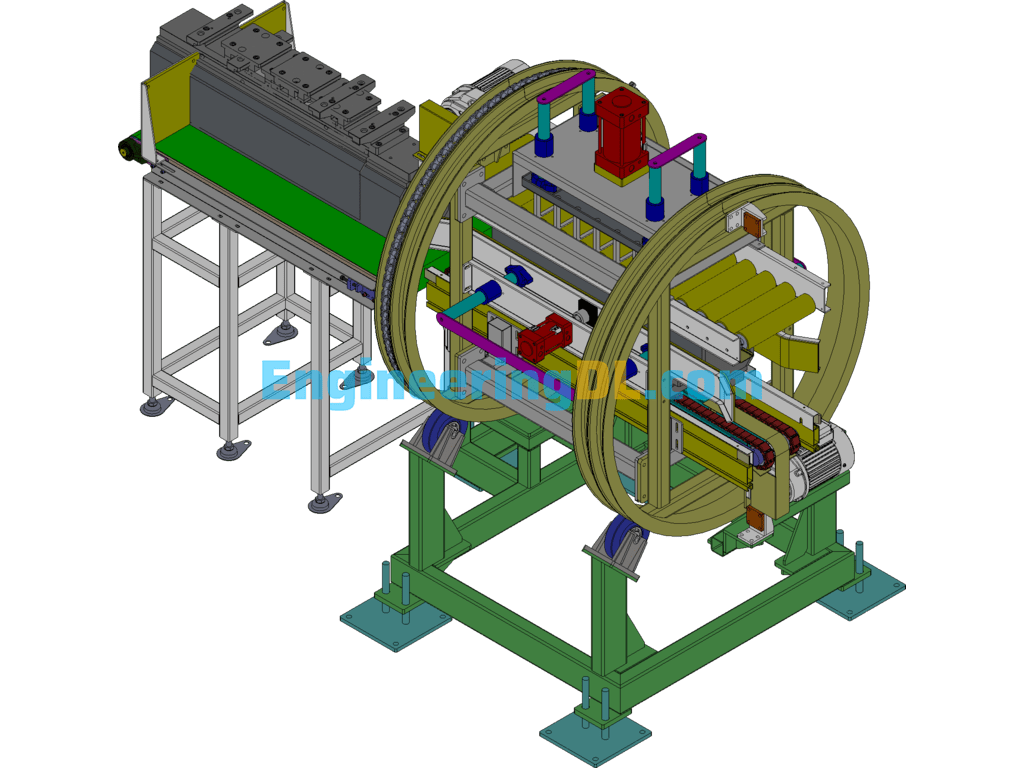
Robot holding device (vacuum absorption + parallel clamping + seventh axis): This robot holding device is designed very exquisitely, consisting of two pairs of gripping machinery to form the entire holding device, vacuum absorption plus a pair of retractable parallel clamping mechanism, the robot is a six-axis heavy load 210 kg robot, and designed with a seventh axis to increase the working radius of the robot. Welcome to download the reference design, upload format XT.
Specification: Multifunctional Machine Holding Device Design (Vacuum Suction + Parallel Clamping + Site-Selected Ground Rail) 3D Exported
|
User Reviews
Be the first to review “Multifunctional Machine Holding Device Design (Vacuum Suction + Parallel Clamping + Site-Selected Ground Rail) 3D Exported”
You must be logged in to post a review.

Multifunctional Machine Holding Device Design (Vacuum Suction + Parallel Clamping + Site-Selected Ground Rail) 3D Exported
There are no reviews yet.