Motorized Direct-Drive Full Lower Limb Exoskeleton SolidWorks

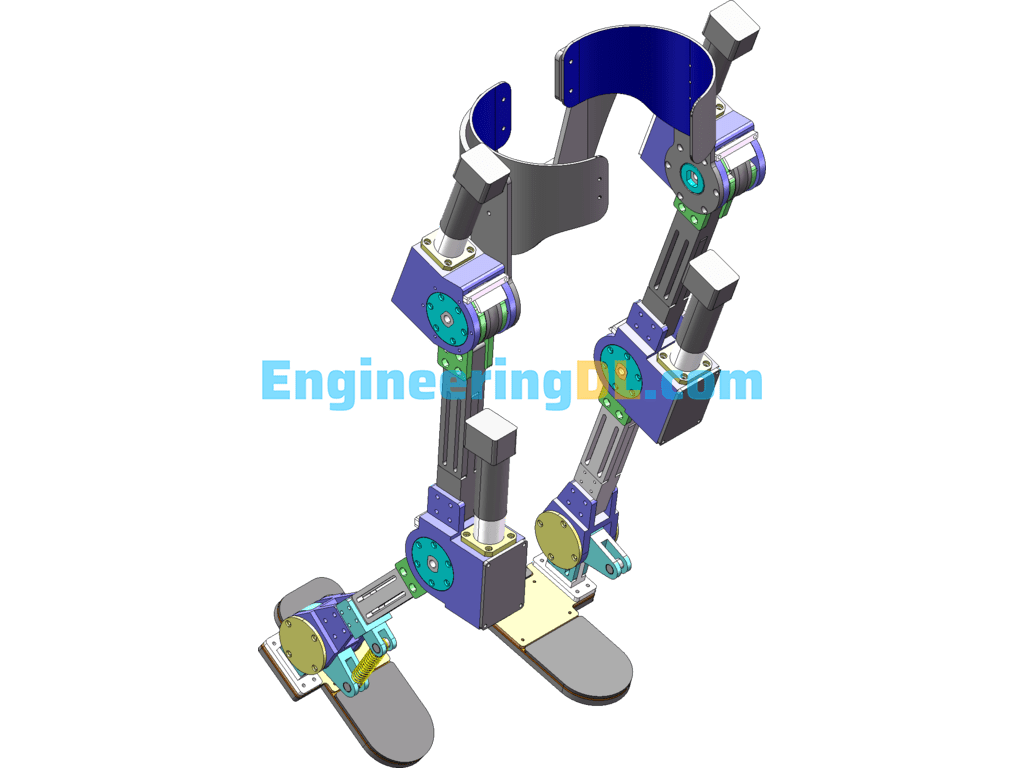
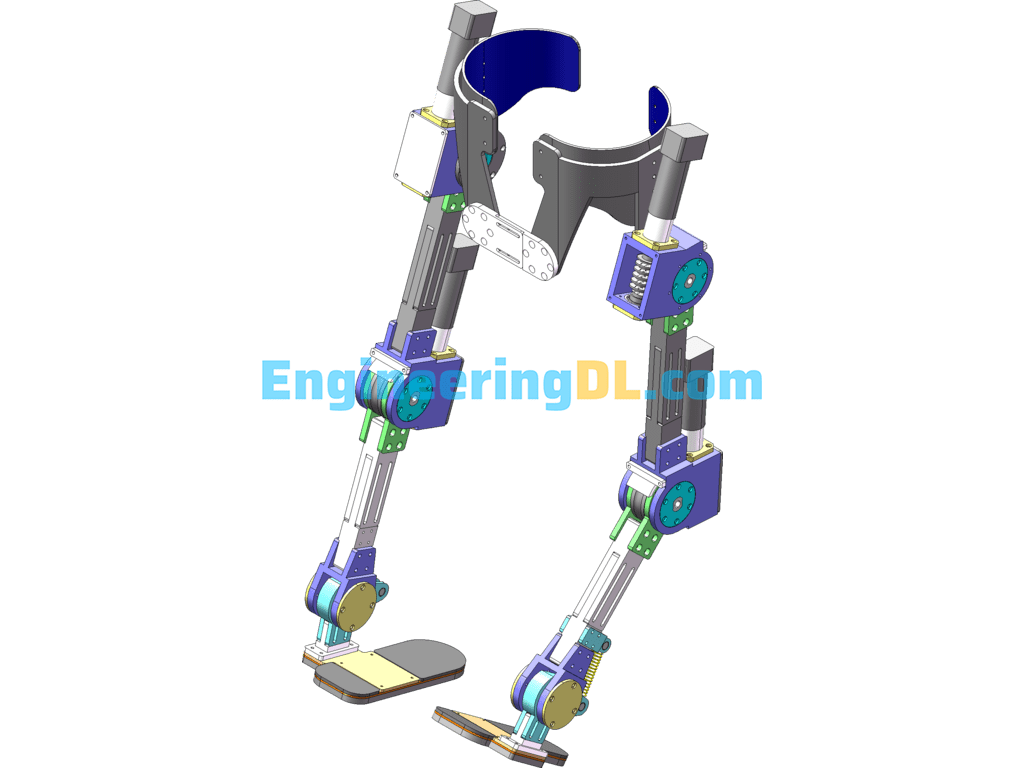
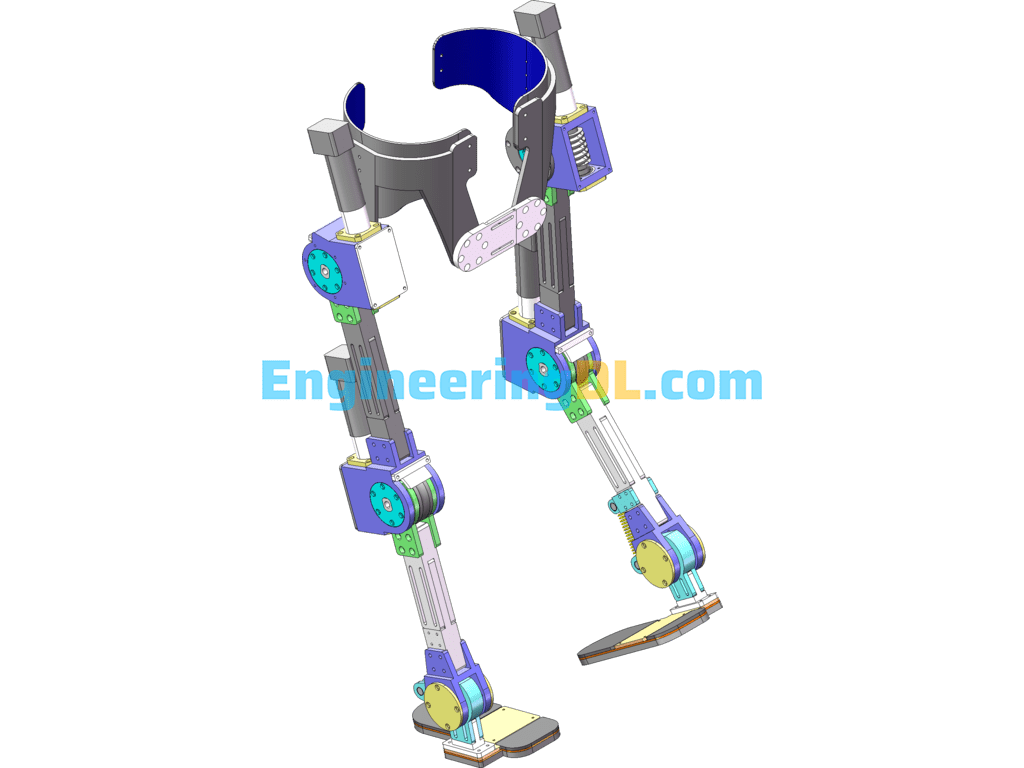
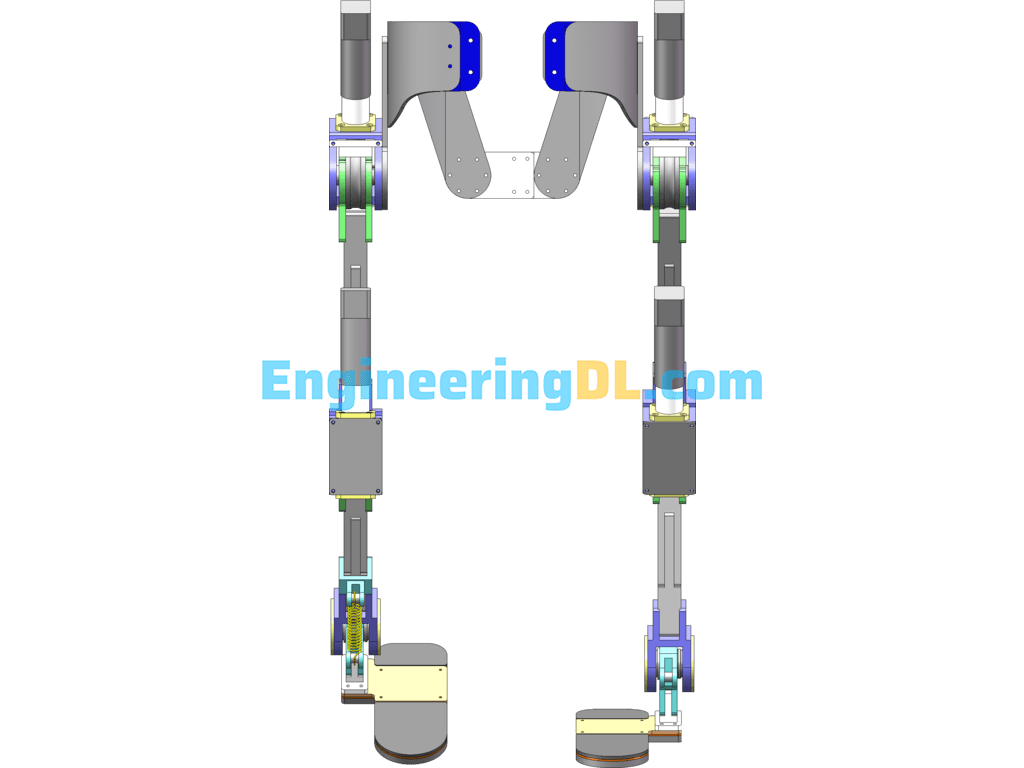
Exoskeleton robotics is a comprehensive technology that integrates sensing, control, information, fusion, and mobile computing to provide a wearable mechanical mechanism for the human operator. The design is a full lower limb exoskeleton, using the motor-reducer-turbo worm drive, the motor reducer is selected from Maxon’s motor and reducer, and the turbo worm is designed by ourselves and can be edited.
Specification: Motorized Direct-Drive Full Lower Limb Exoskeleton SolidWorks
|
User Reviews
Be the first to review “Motorized Direct-Drive Full Lower Limb Exoskeleton SolidWorks”
You must be logged in to post a review.

Motorized Direct-Drive Full Lower Limb Exoskeleton SolidWorks
There are no reviews yet.