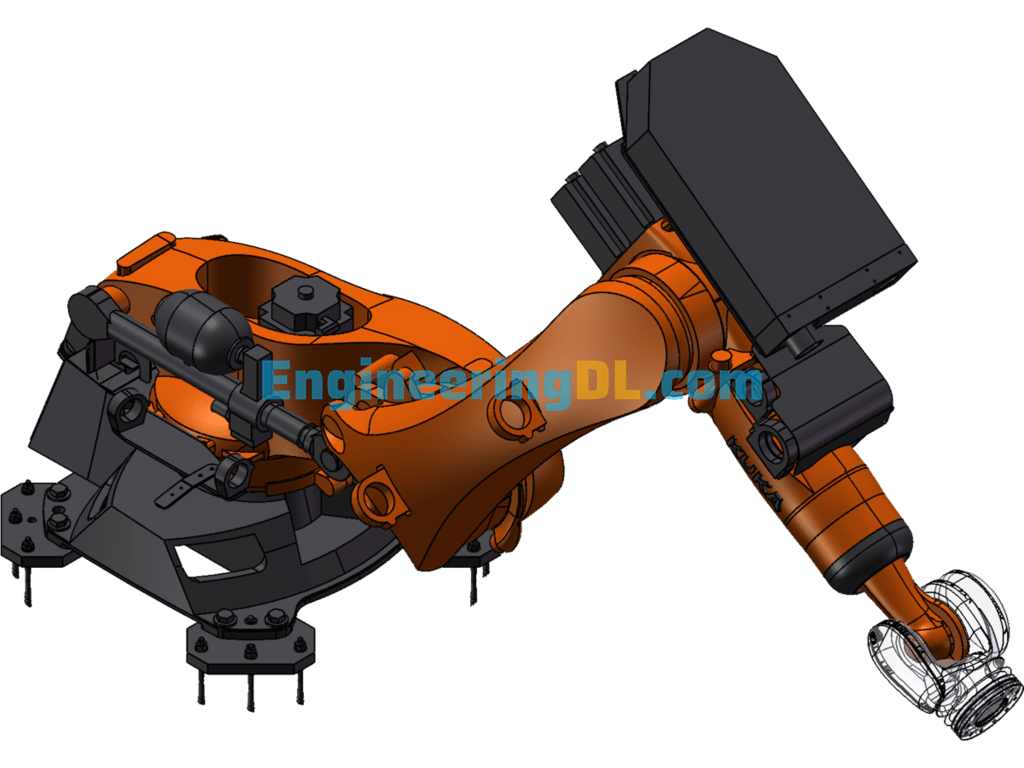
Industrial Robots SolidWorks
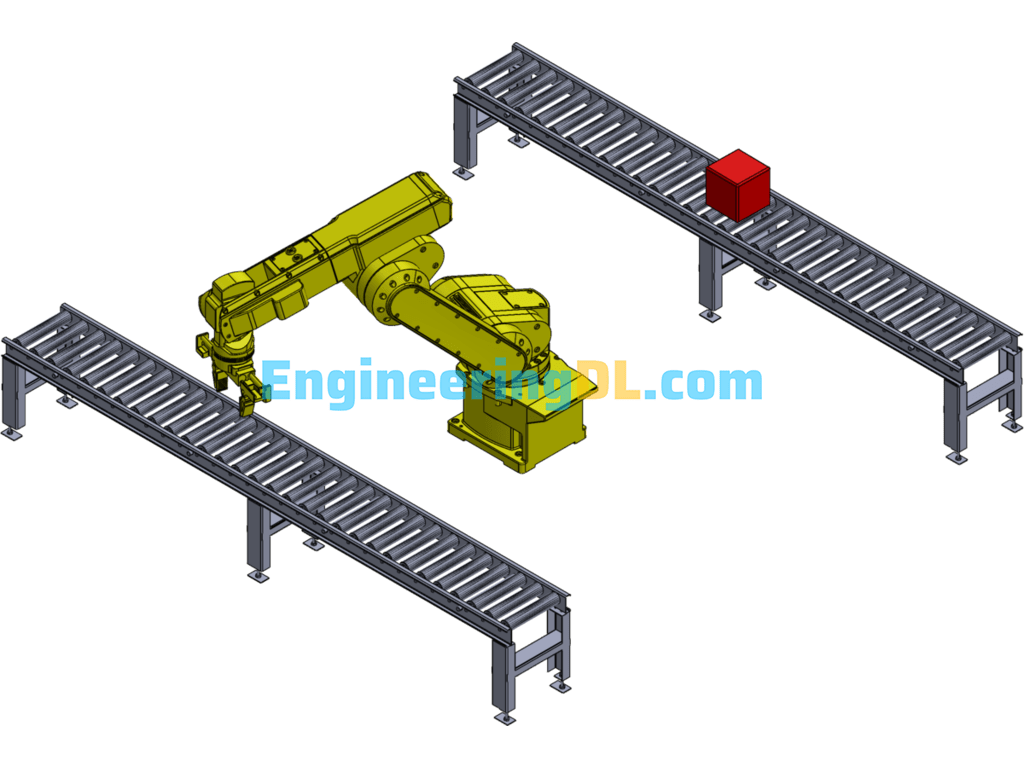
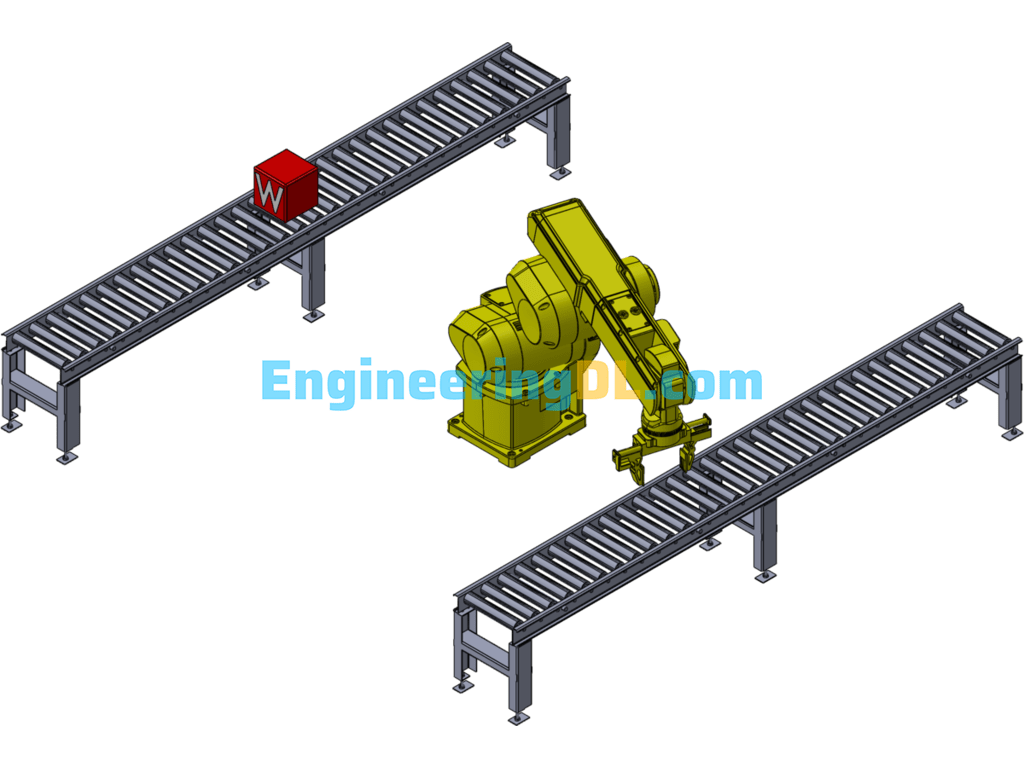
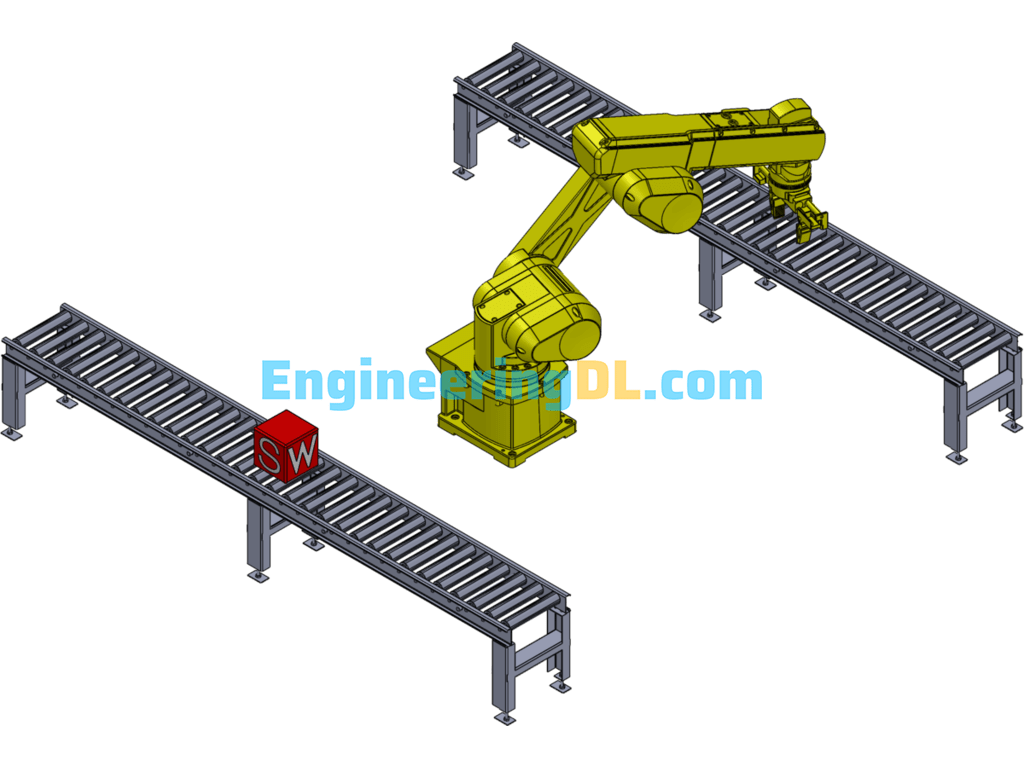
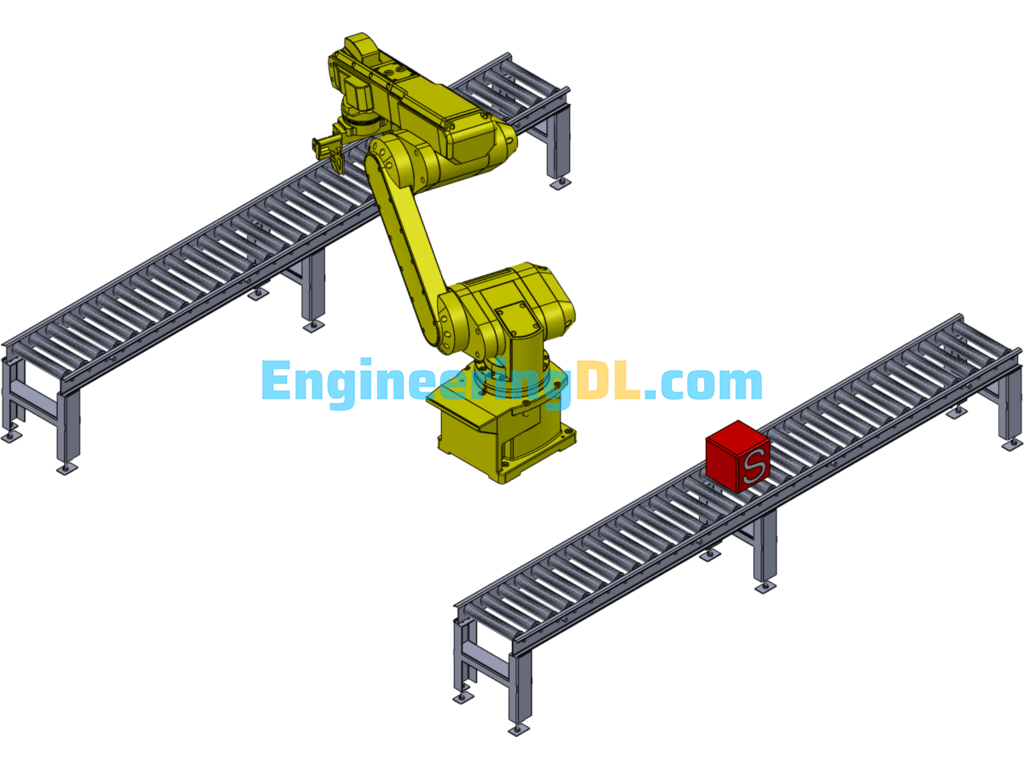
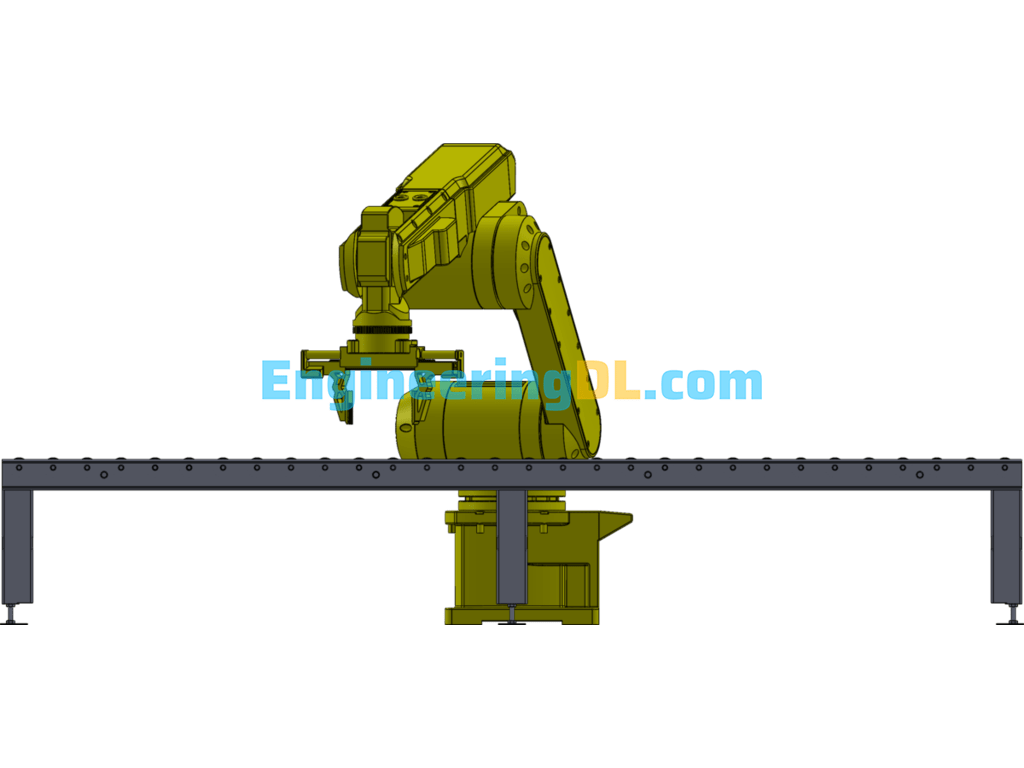
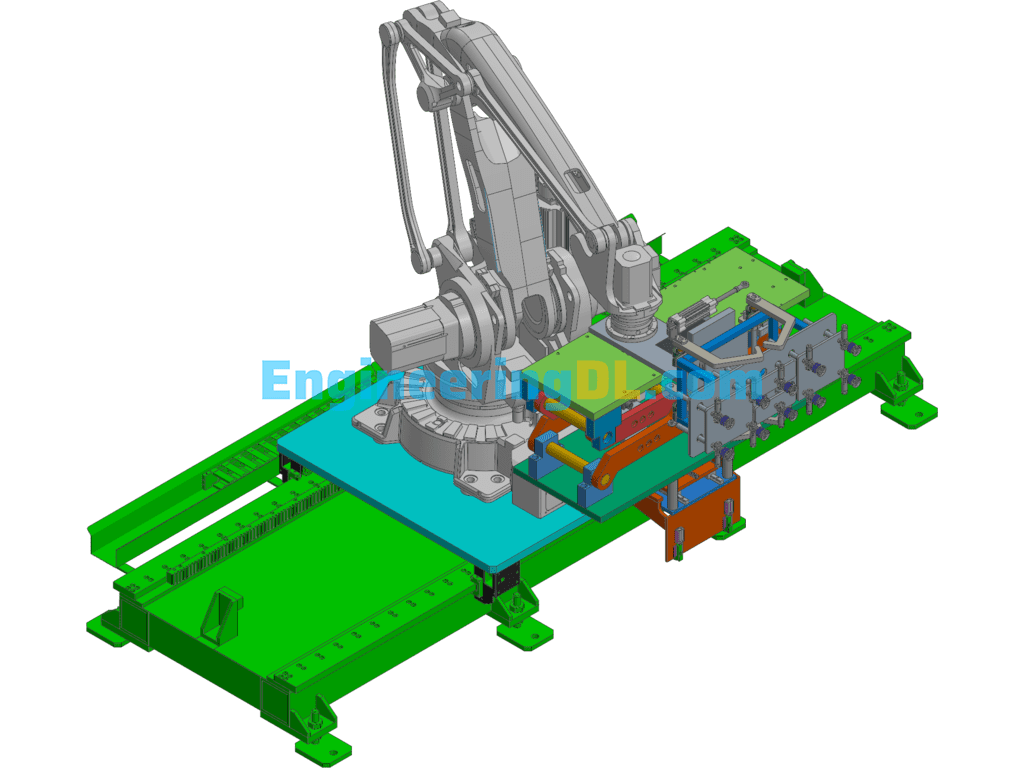
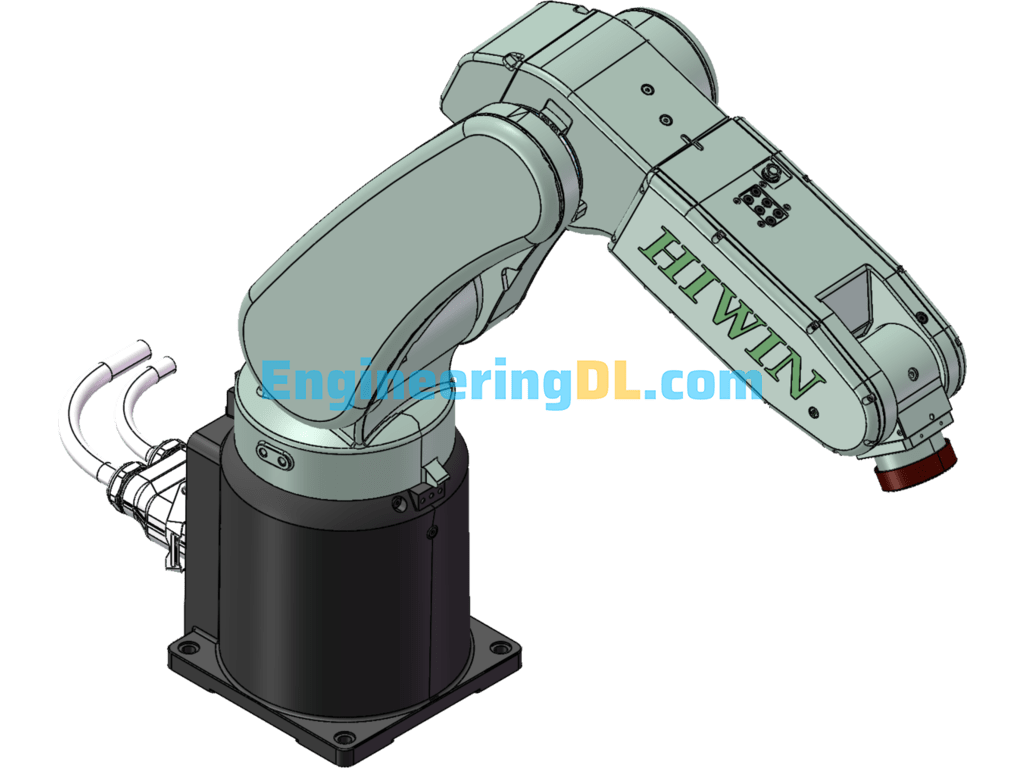
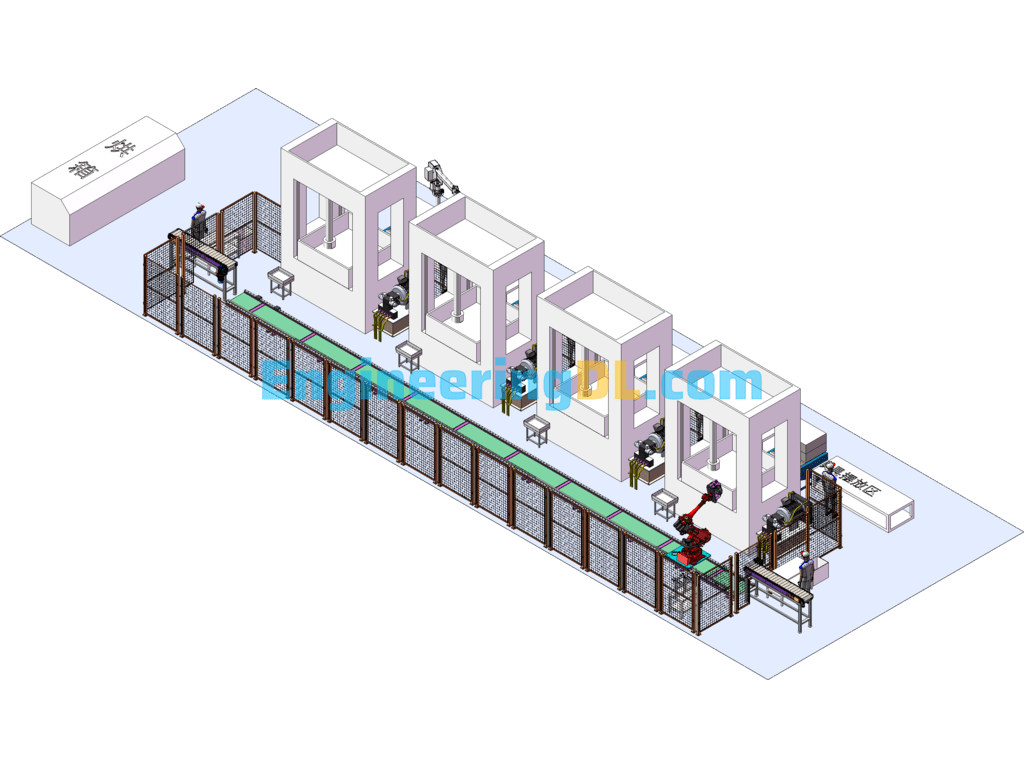
Industrial robot hand, hand part is used to grip the workpiece (or tool) components, according to the shape, size, weight, material and operational requirements of the gripped object and there are a variety of structural forms, such as clamping type, holding type and adsorption type. Motion mechanism, so that the hand to complete a variety of rotation (oscillation), movement or composite motion to achieve the specified action, upload sw source file. Editable model!
Specification: Industrial Robots SolidWorks
|
User Reviews
Be the first to review “Industrial Robots SolidWorks”
You must be logged in to post a review.

There are no reviews yet.