Embracing Institutions SolidWorks
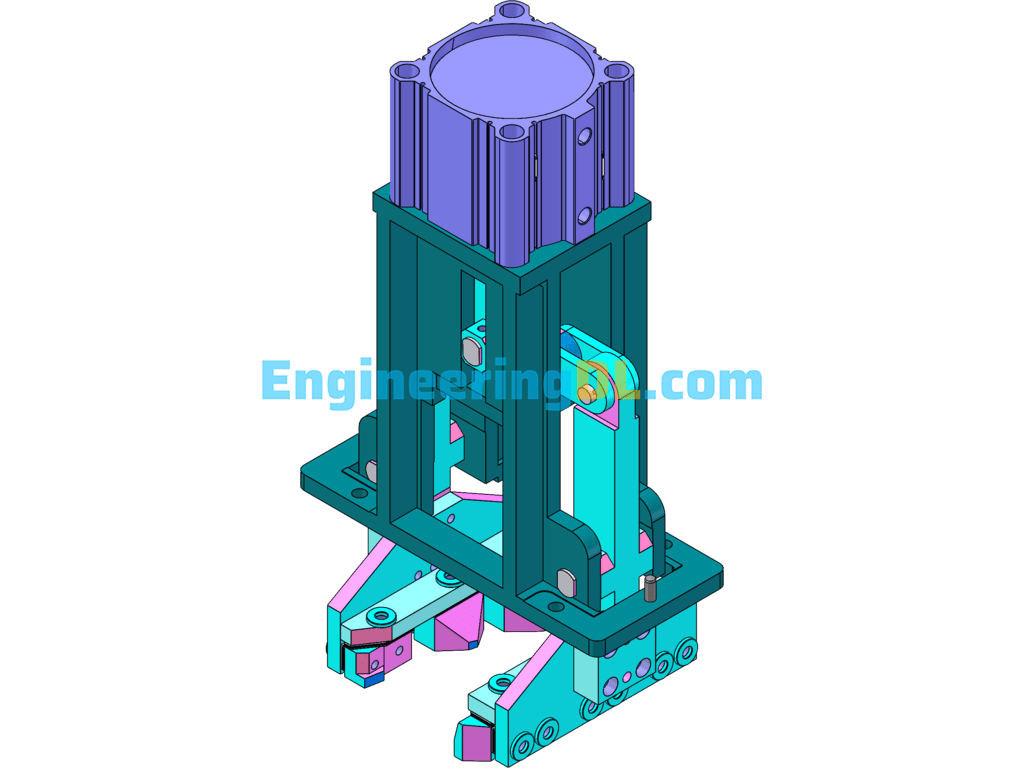
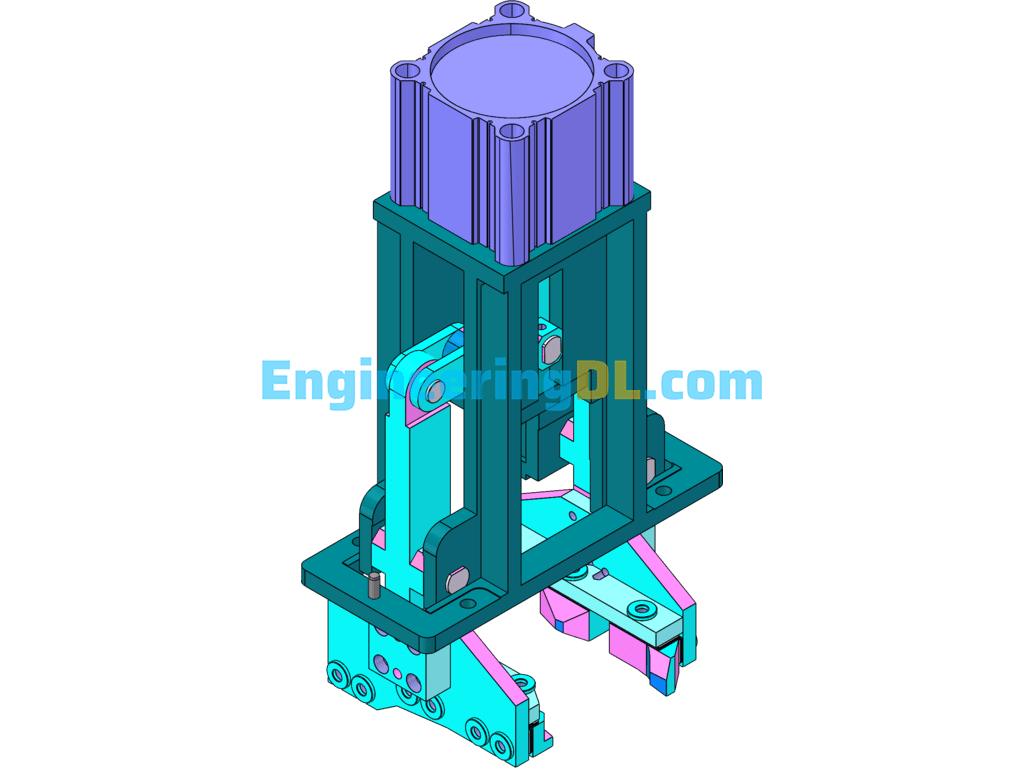
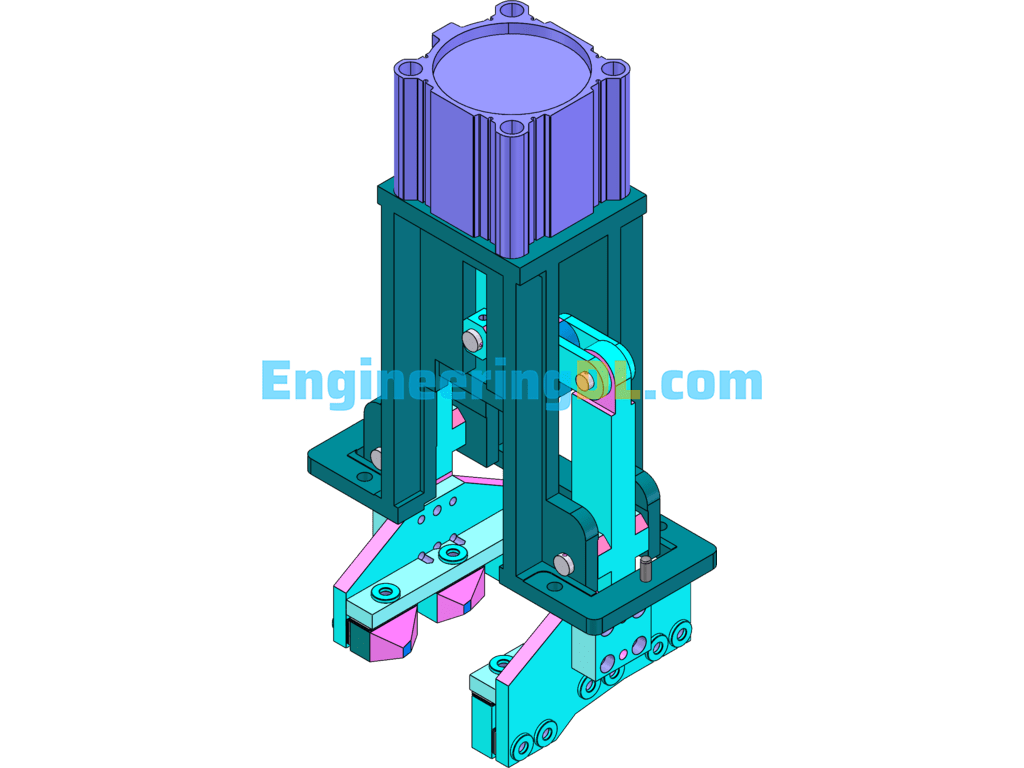

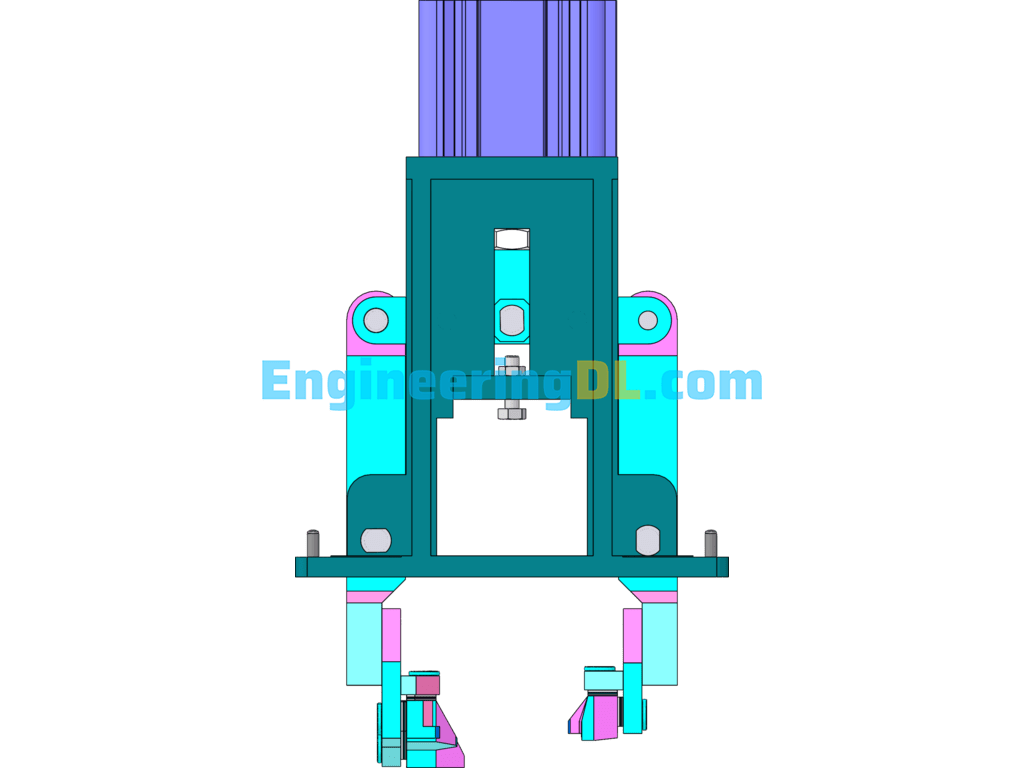
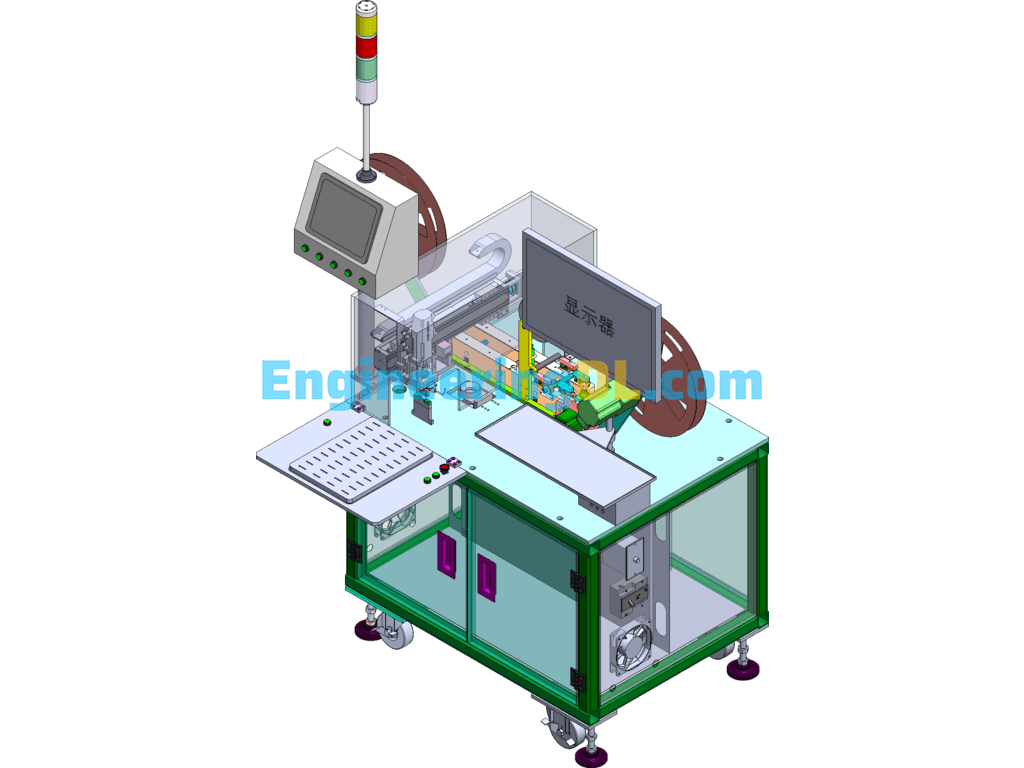
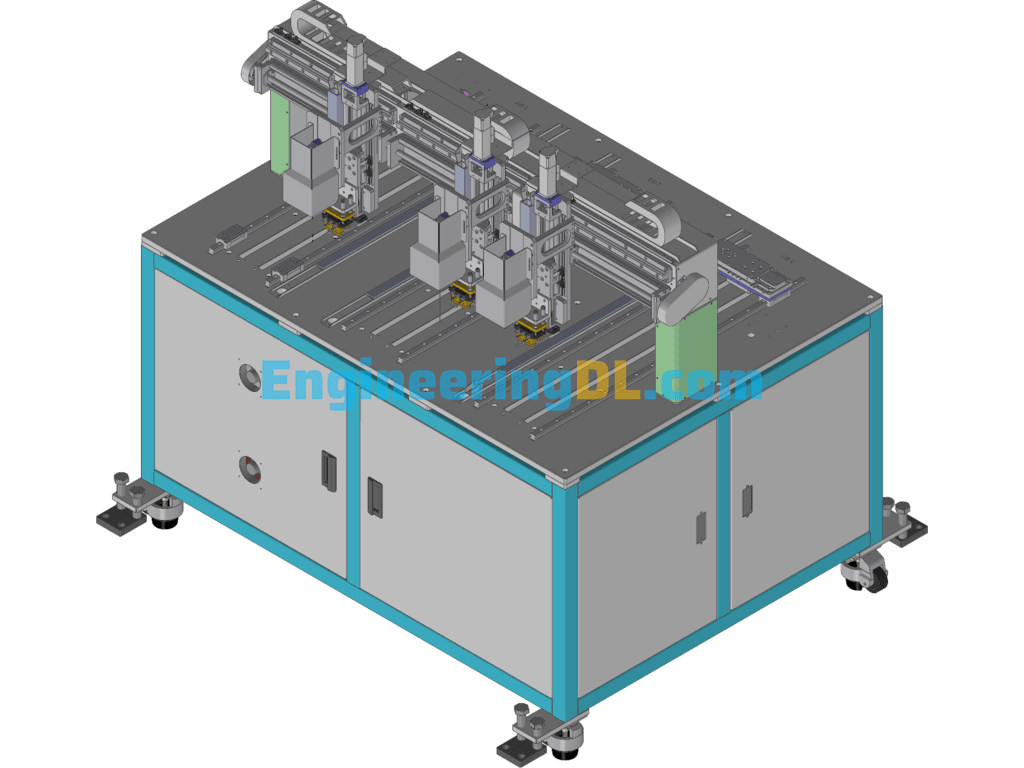
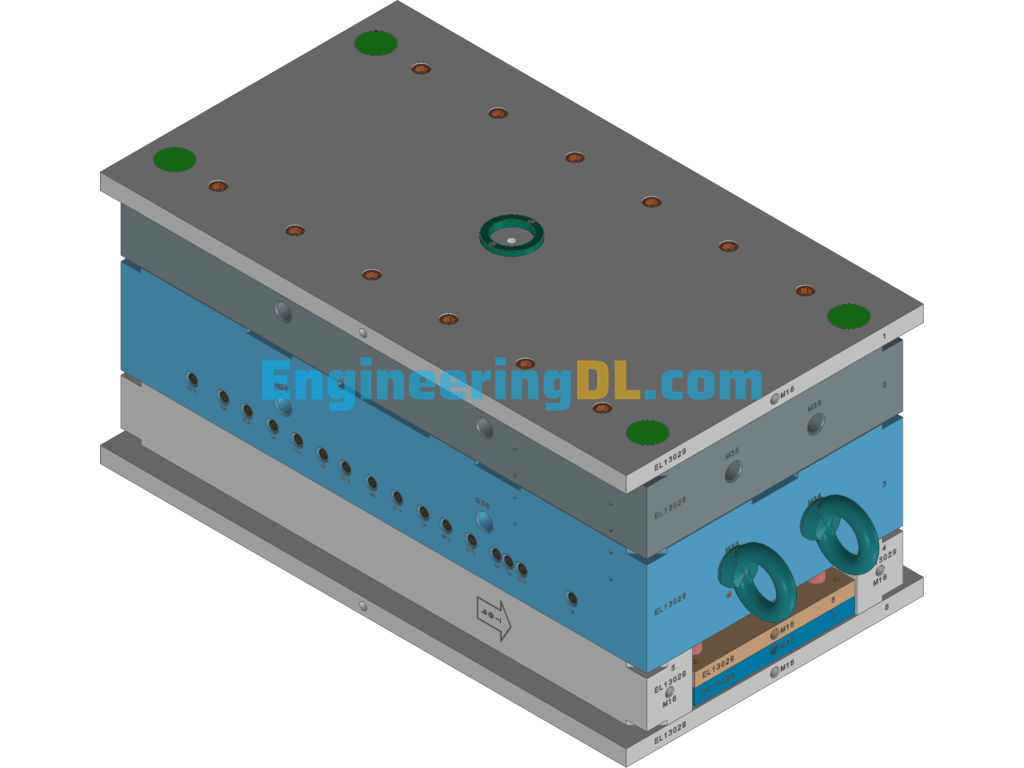
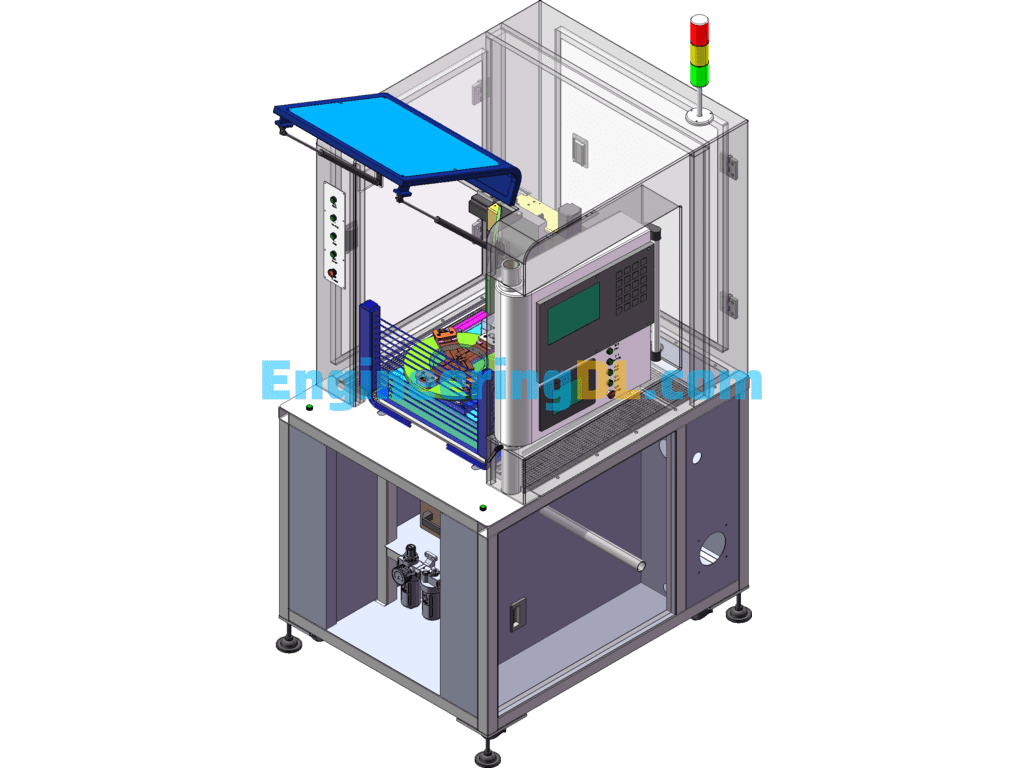
It is the last link and execution part of the interaction between robot and environment, and its performance largely determines the working performance of the whole robot. It includes 2 fingers, 3 fingers and deformed fingers; special hand claws including magnetic suction cup, welding gun, etc.; general hand claws including 2 fingers to 5 fingers.
This model is drawn and assembled using solidworks software, welcome to download for reference and research use.
Specification: Embracing Institutions SolidWorks
|
User Reviews
Be the first to review “Embracing Institutions SolidWorks”
You must be logged in to post a review.

There are no reviews yet.