A Delta Robot 6-Axis Robot SolidWorks, 3D Exported
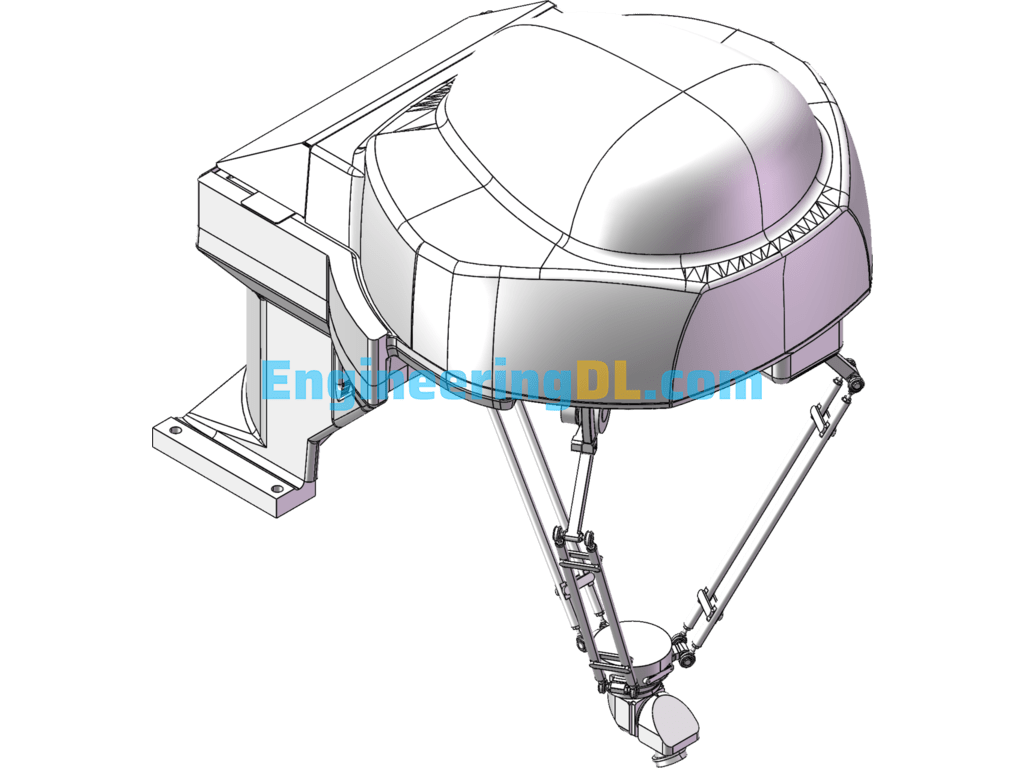
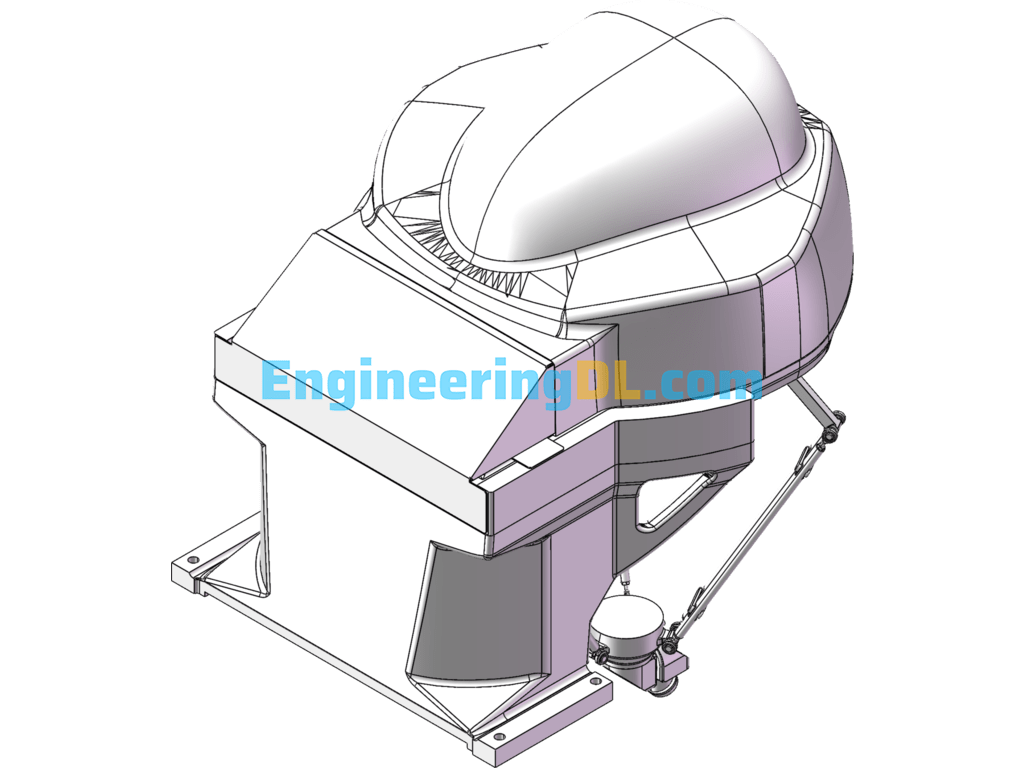
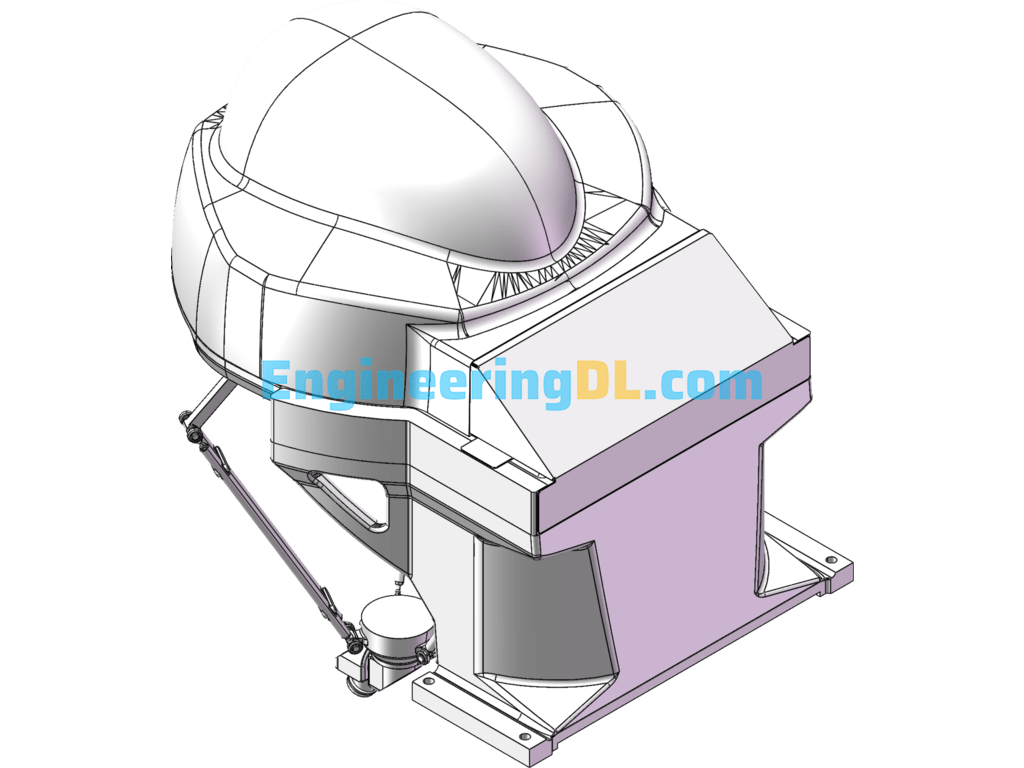
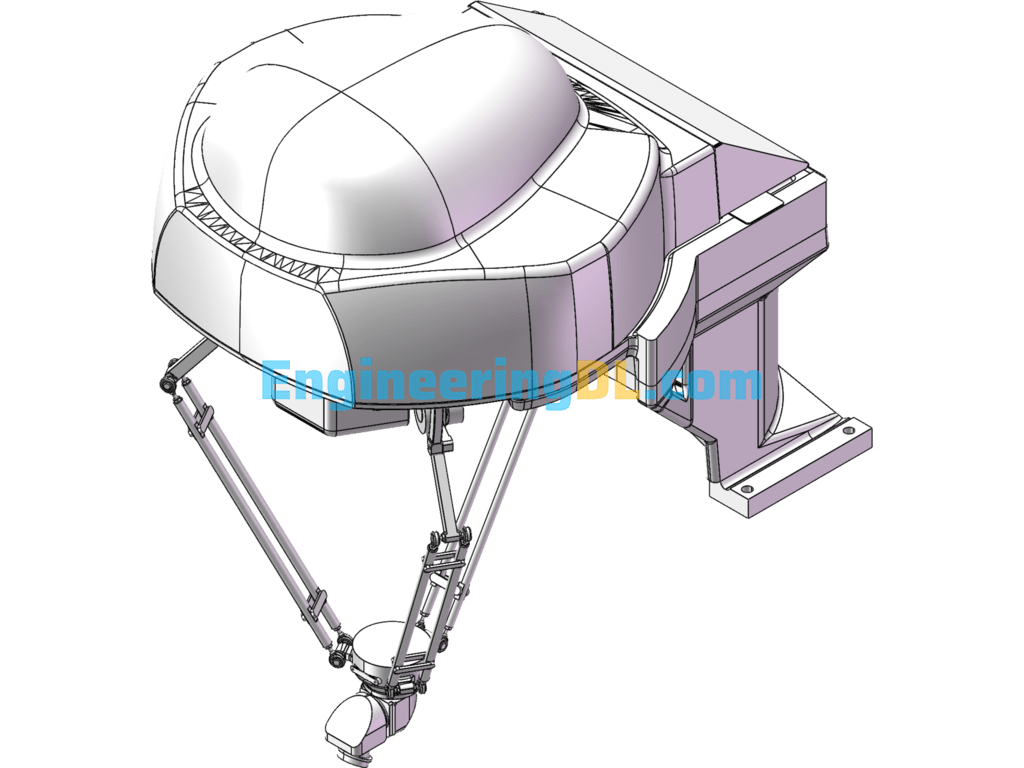
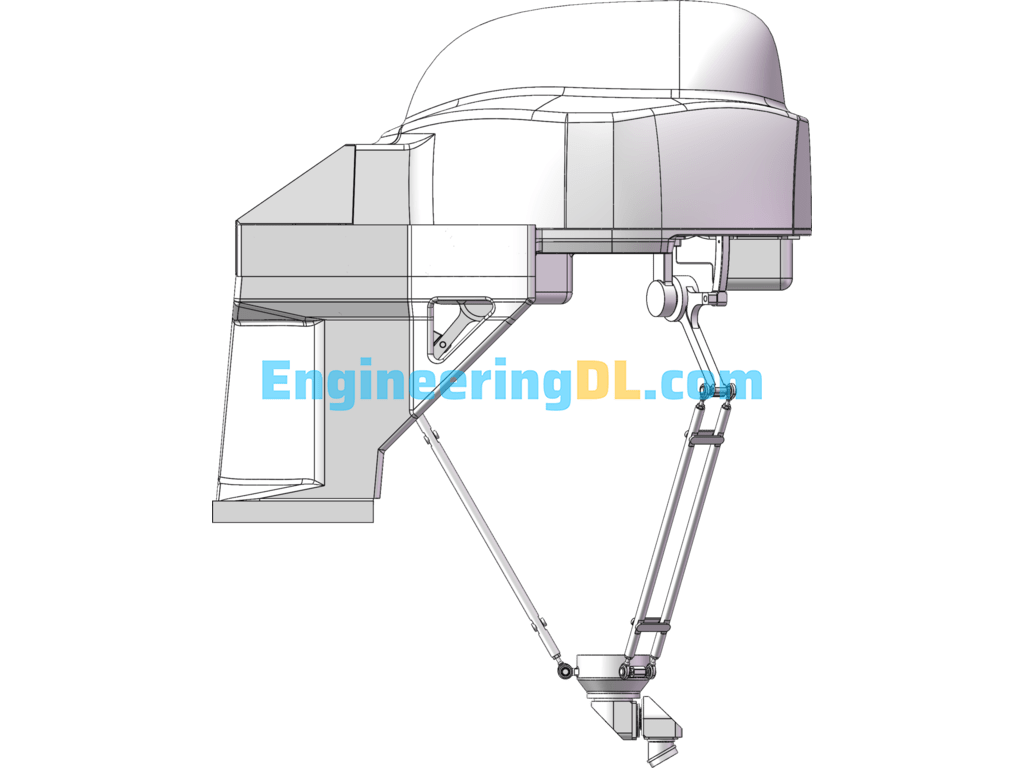
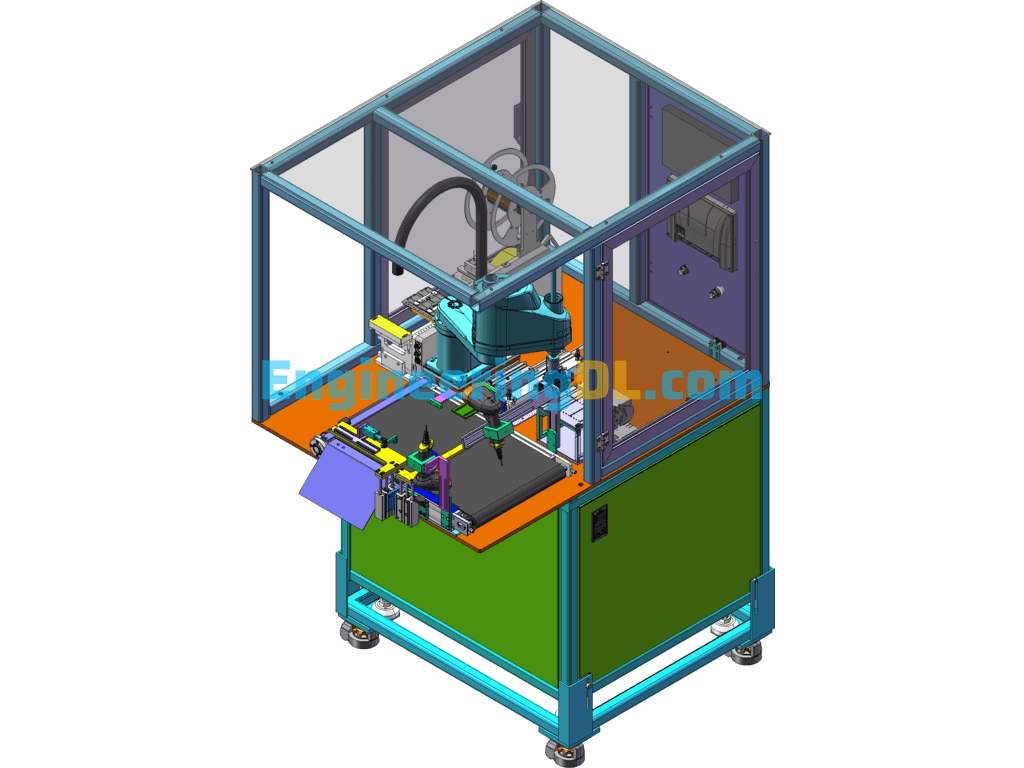
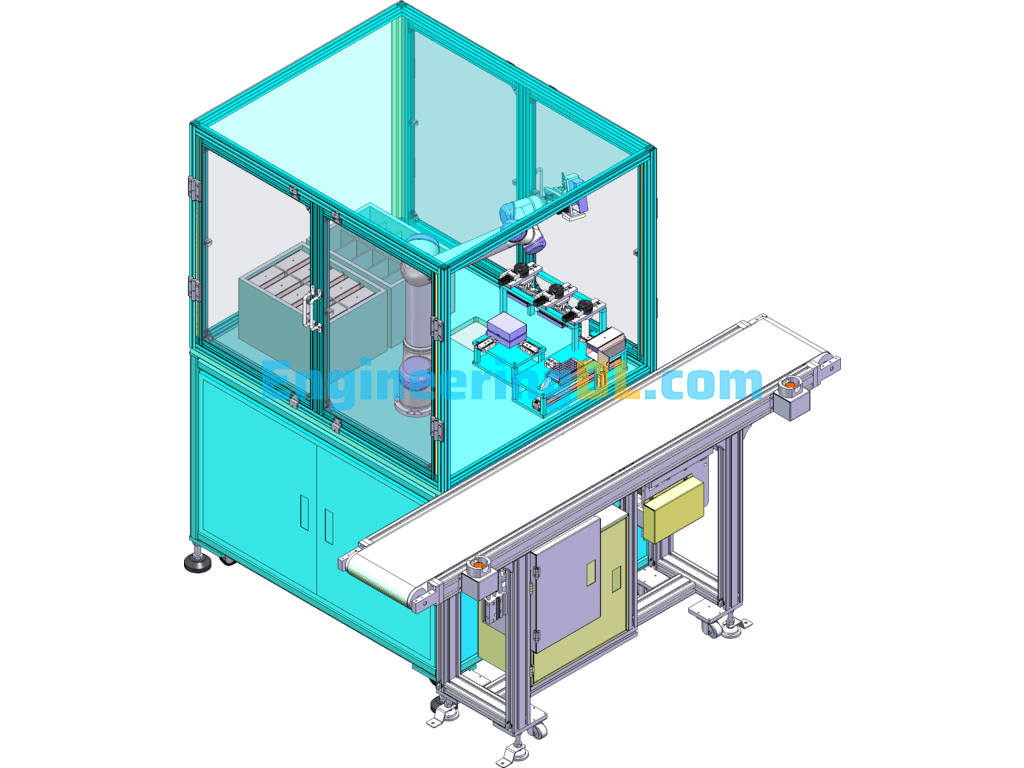
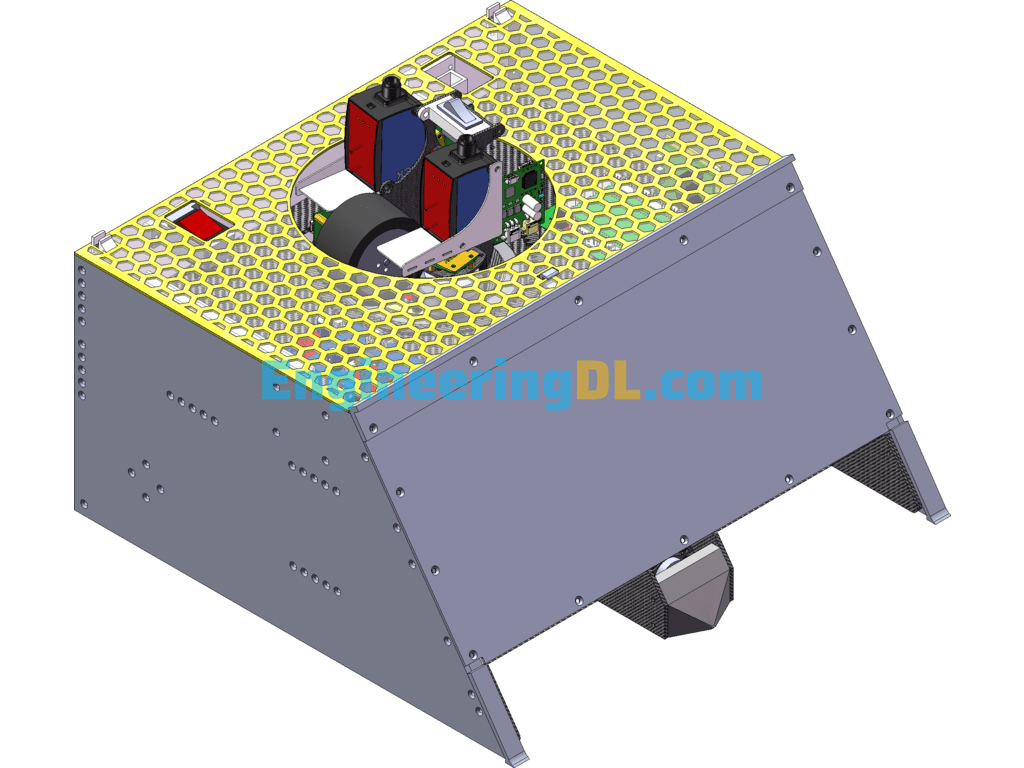
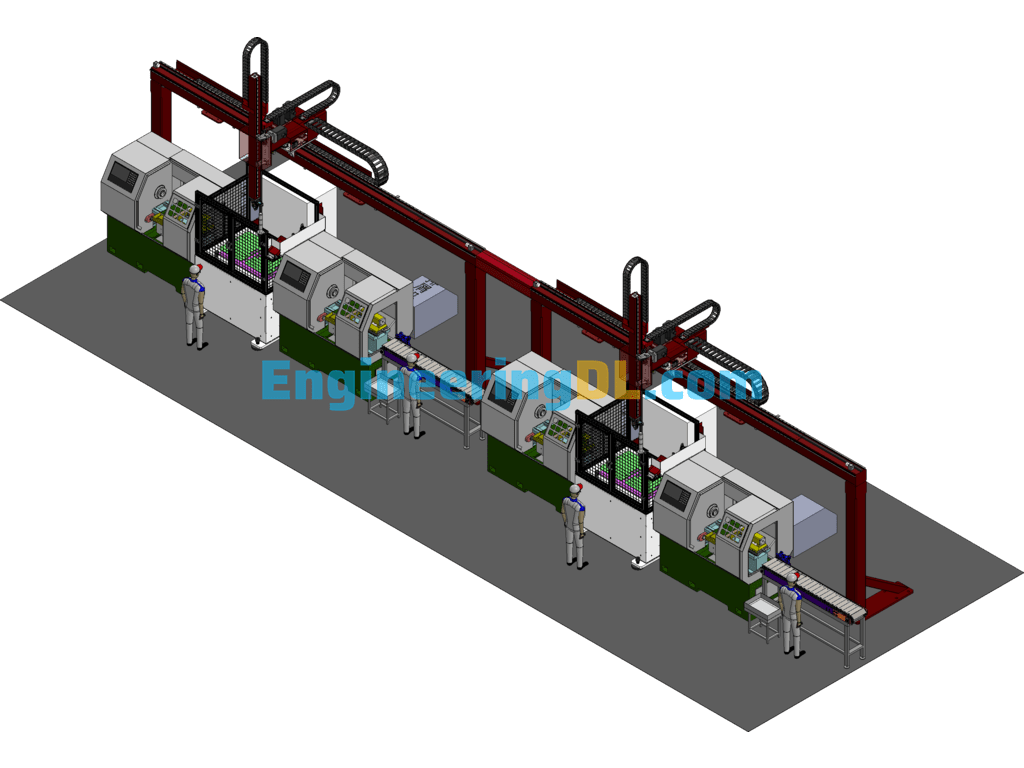
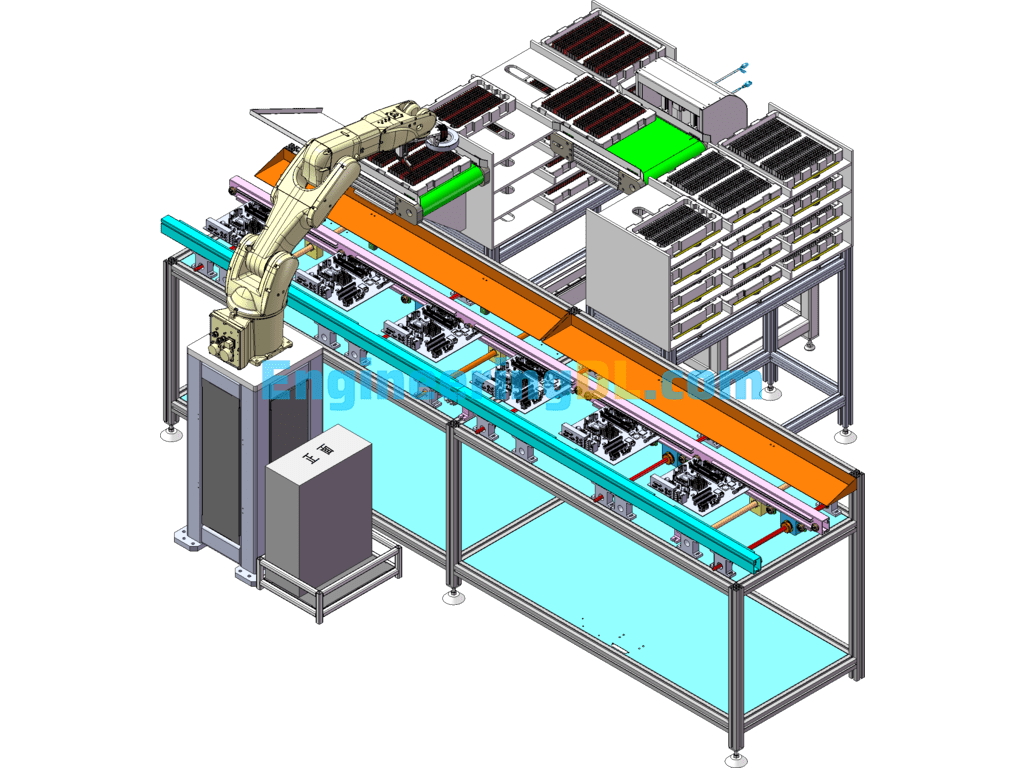
A delta robot, 6-axis robot, model mainly consists of three major parts: hand, motion mechanism and control system. The hand part is the part used to grip the workpiece (or tool), and there are various structural forms according to the shape, size, weight, material and operation requirements of the gripped object, such as clamping type, holding type and adsorption type, etc. Motion mechanism, so that the hand to complete a variety of rotation (oscillation), movement or composite movement to achieve the prescribed action, change the position and posture of the gripped object. The independent movement of the motion mechanism, such as lifting, telescoping and rotating, is called the degree of freedom of the manipulator. In order to grasp objects in any position and orientation in space, but does not contain parameters, can be edited, can be opened with SOLIDWORKS2014, a very good learning material.
Specification: A Delta Robot 6-Axis Robot SolidWorks, 3D Exported
|
User Reviews
Be the first to review “A Delta Robot 6-Axis Robot SolidWorks, 3D Exported”
You must be logged in to post a review.

There are no reviews yet.