Robotics SolidWorks
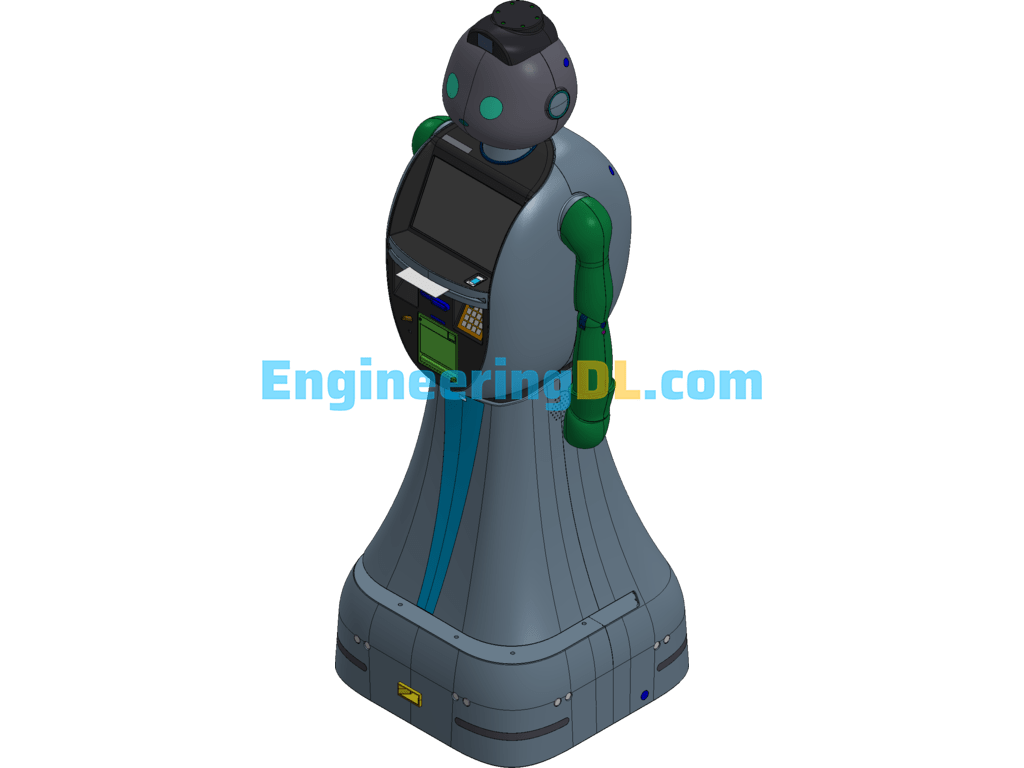
Robot 3D model SW2012 design sldasm ??? sldprt files are provided. The robot body, its arm generally adopts the space open chain linkage mechanism Robot high-tech products (18), in which the motion sub (rotation sub or movement sub) is often called joint, the number of joints is usually the number of degrees of freedom of the robot. Depending on the type of joint configuration and the form of motion coordinates, robot actuators can be divided into right-angle coordinate, cylindrical coordinate, polar coordinate, and joint coordinate types. For anthropomorphic considerations, the relevant parts of the robot body are often referred to as the base, waist, arm, wrist, hand (gripper or end-effector) and walking parts (for mobile robots), etc.


There are no reviews yet.