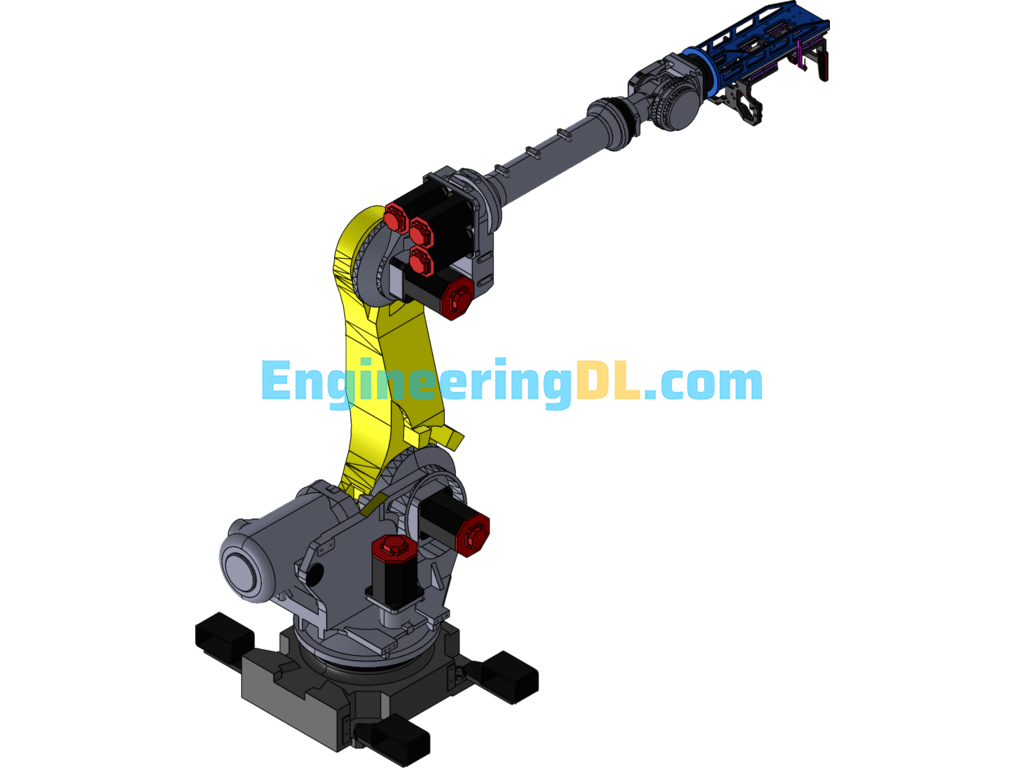
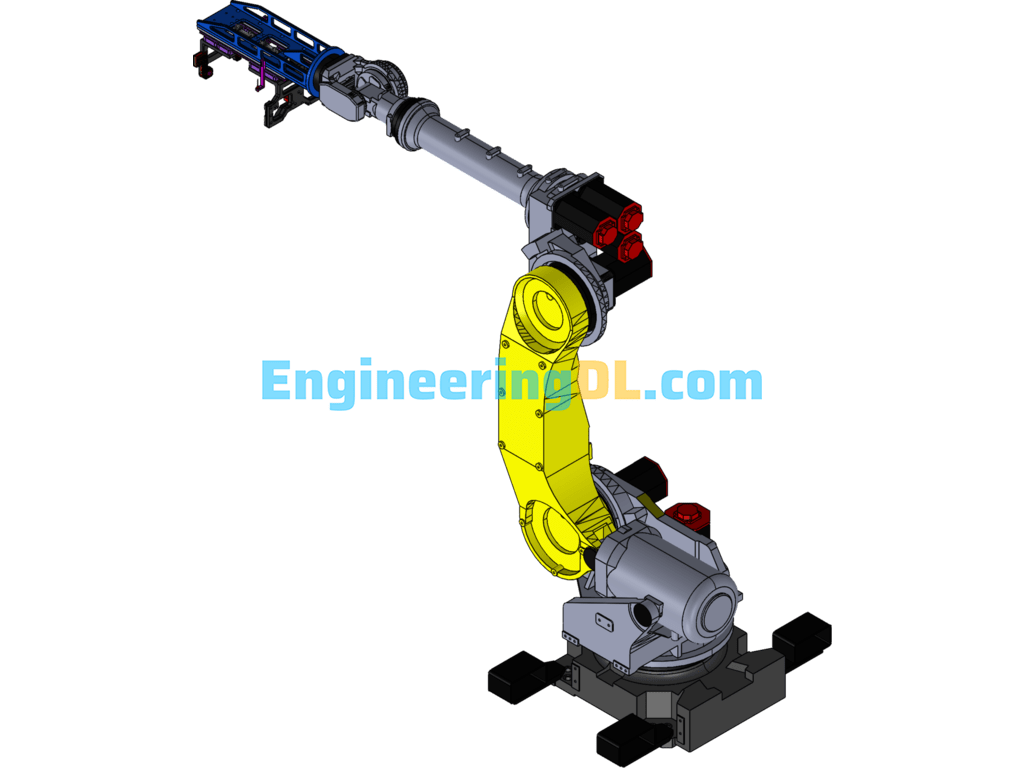
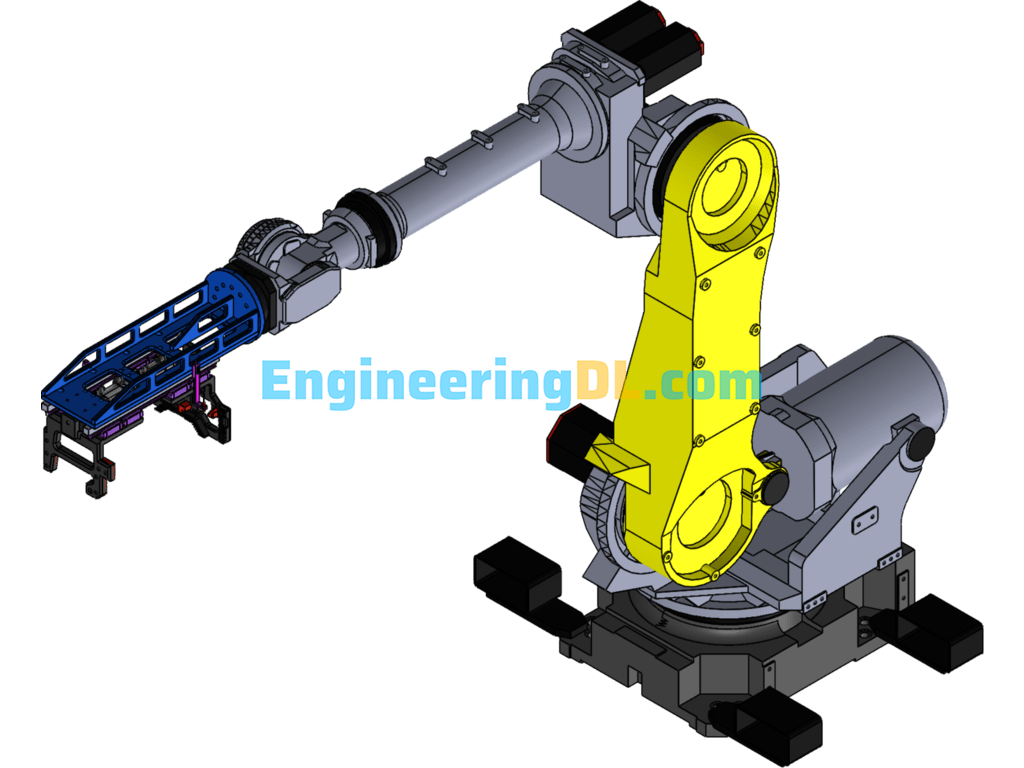
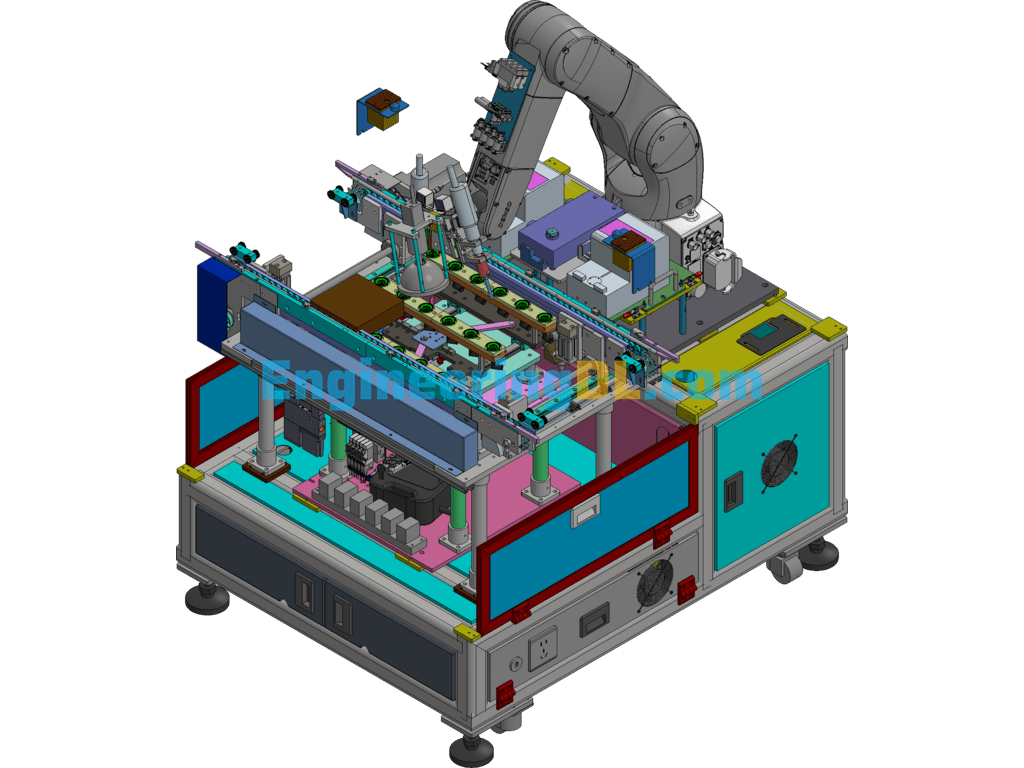
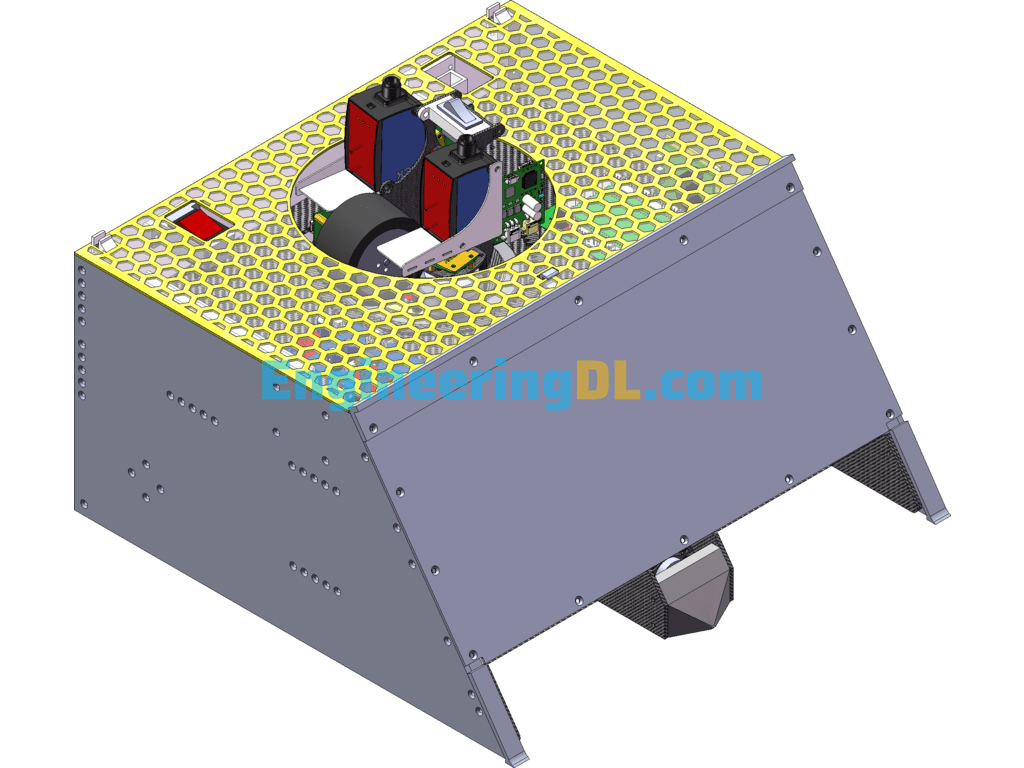
Robot Hand Grip 3D Exported
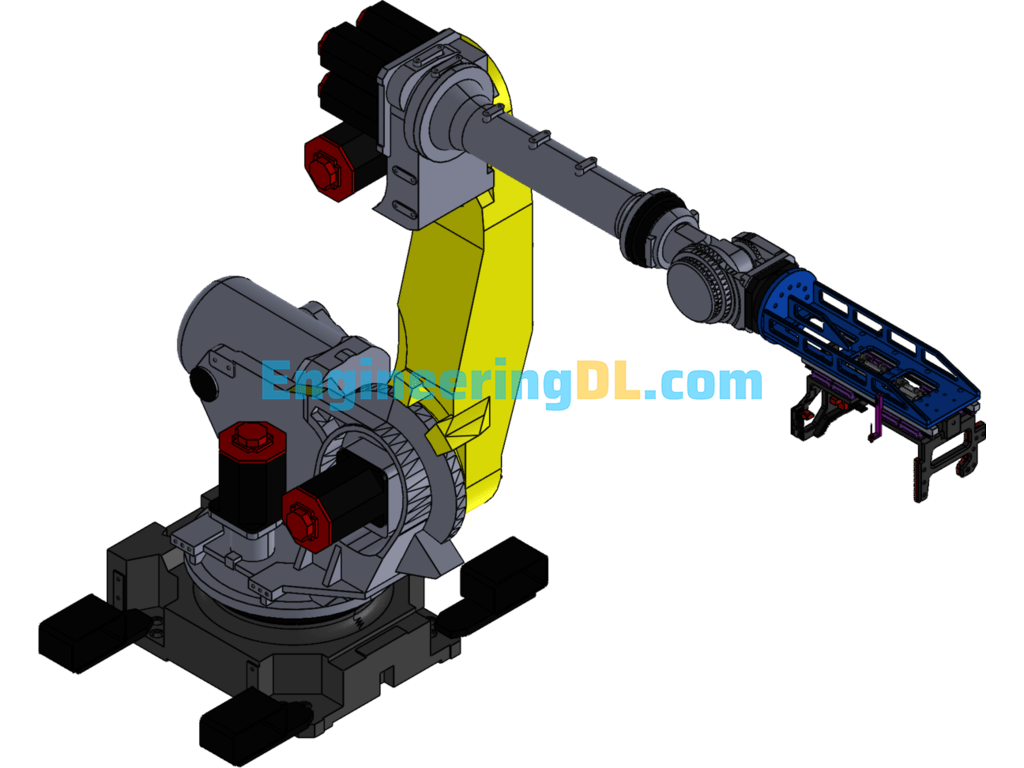
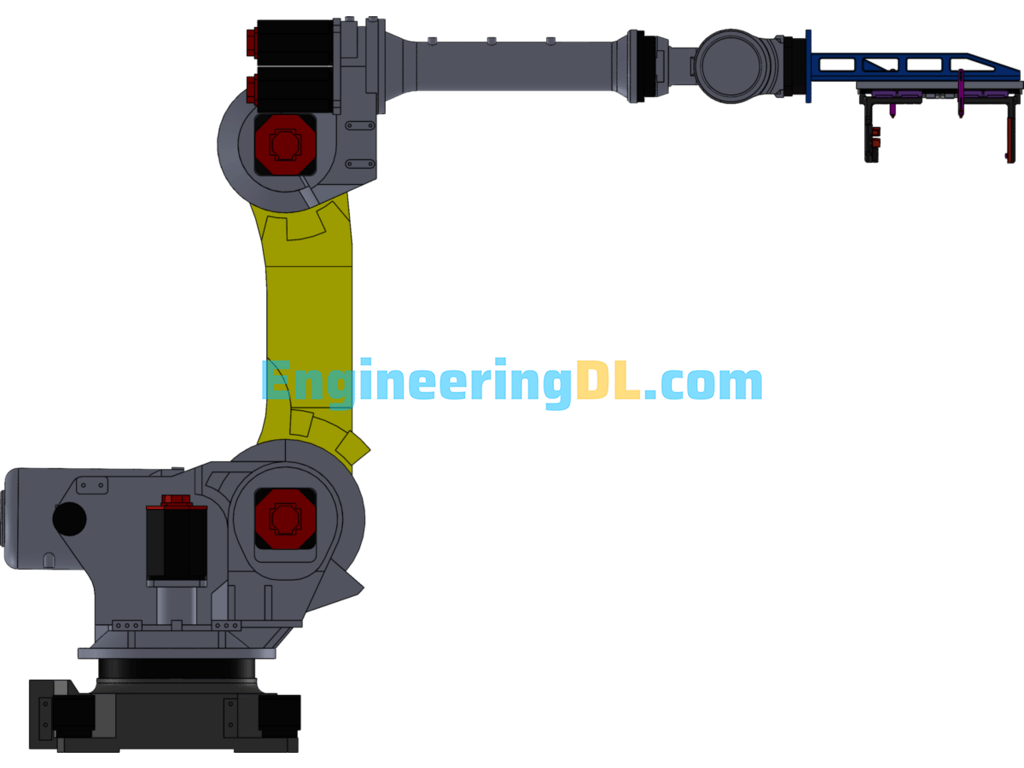
1.This hand grip is applicable to the gripping of an auto part (product).
2.The product needs to be gripped by robot (Fanuc R-2000iB1+165F) after it comes out of die-casting machine; it is placed in sawing machine in order to remove the material shank, fine punching in hydraulic punching machine, and then gripped and placed on the conveying line.
3.The weight of hand grip: about 43KG, and the product is about 20KG.
Specification: Robot Hand Grip 3D Exported
|
User Reviews
Be the first to review “Robot Hand Grip 3D Exported”
You must be logged in to post a review.


There are no reviews yet.