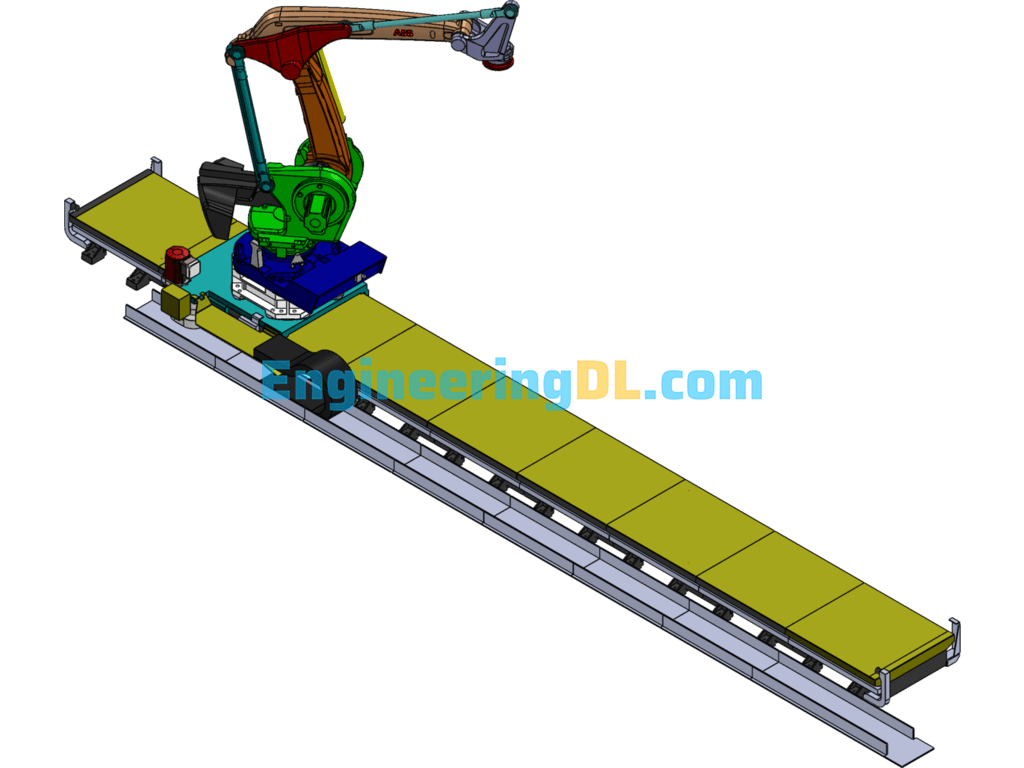
Robot Design Model For Clamping Use SolidWorks
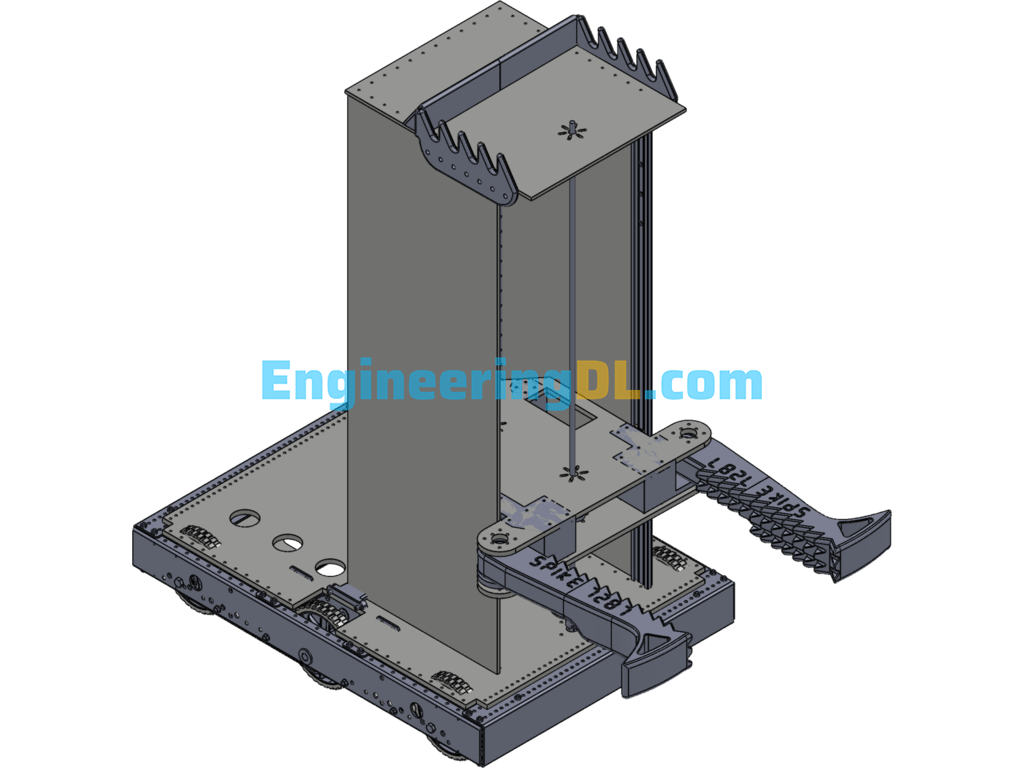
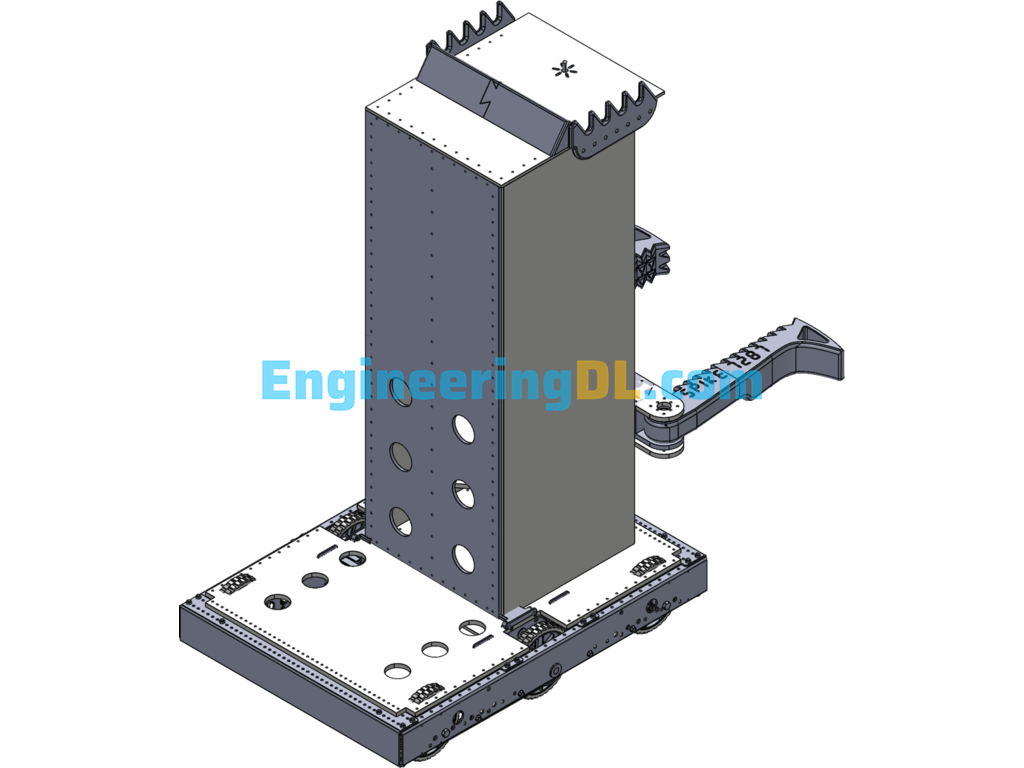
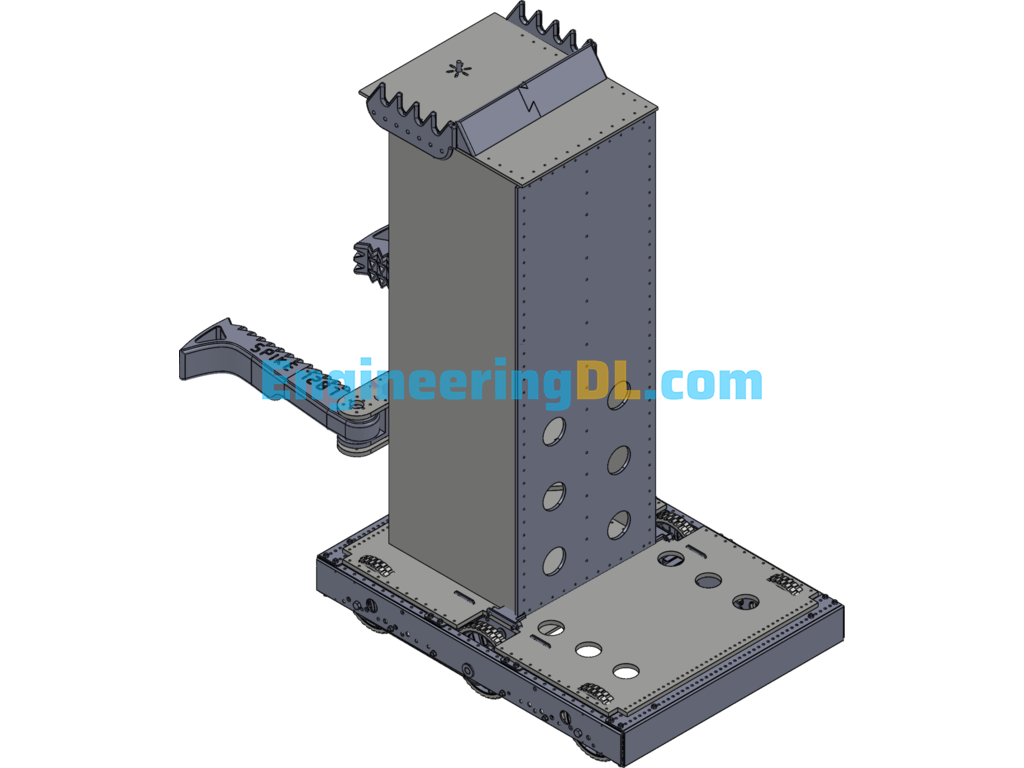
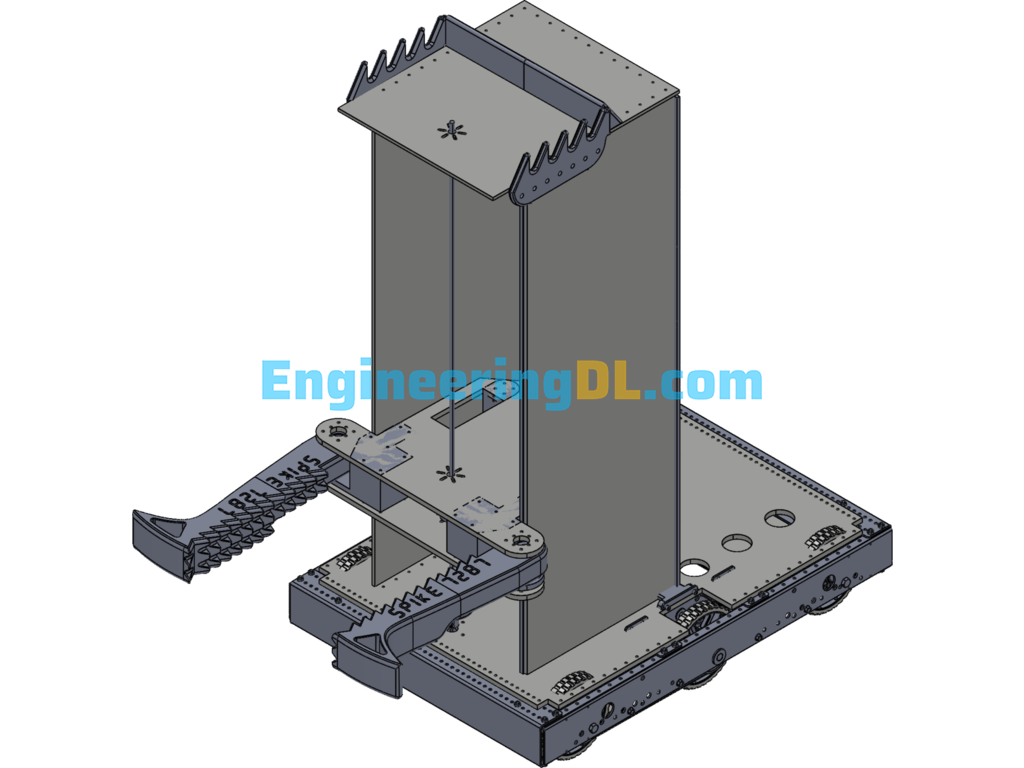
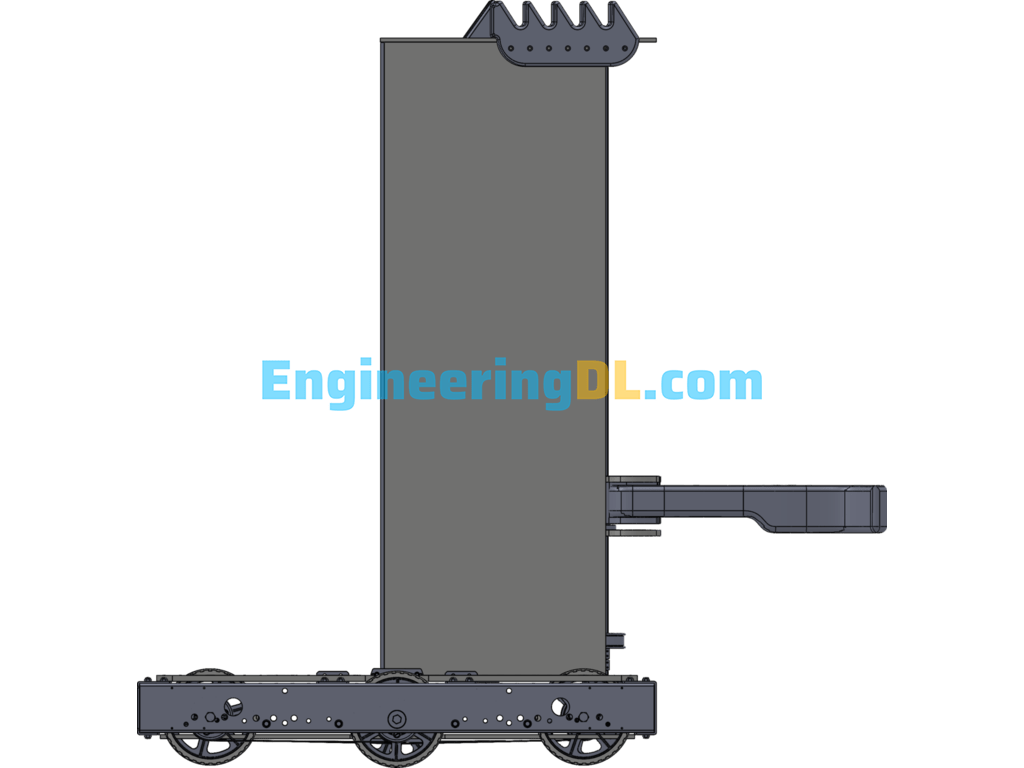
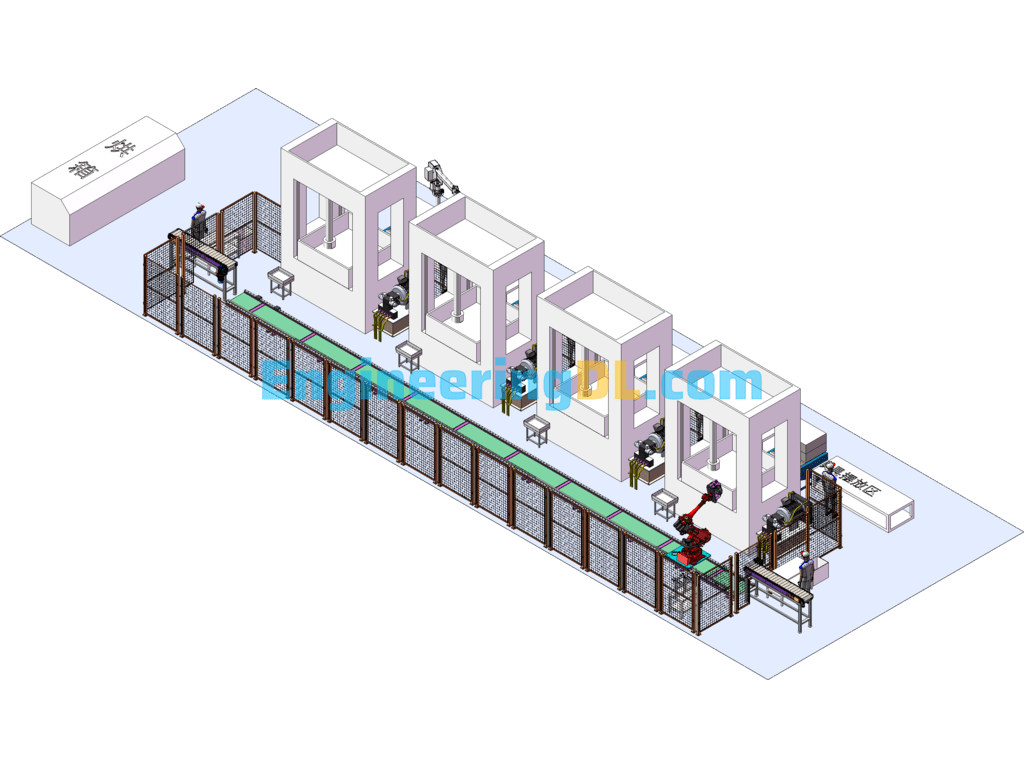
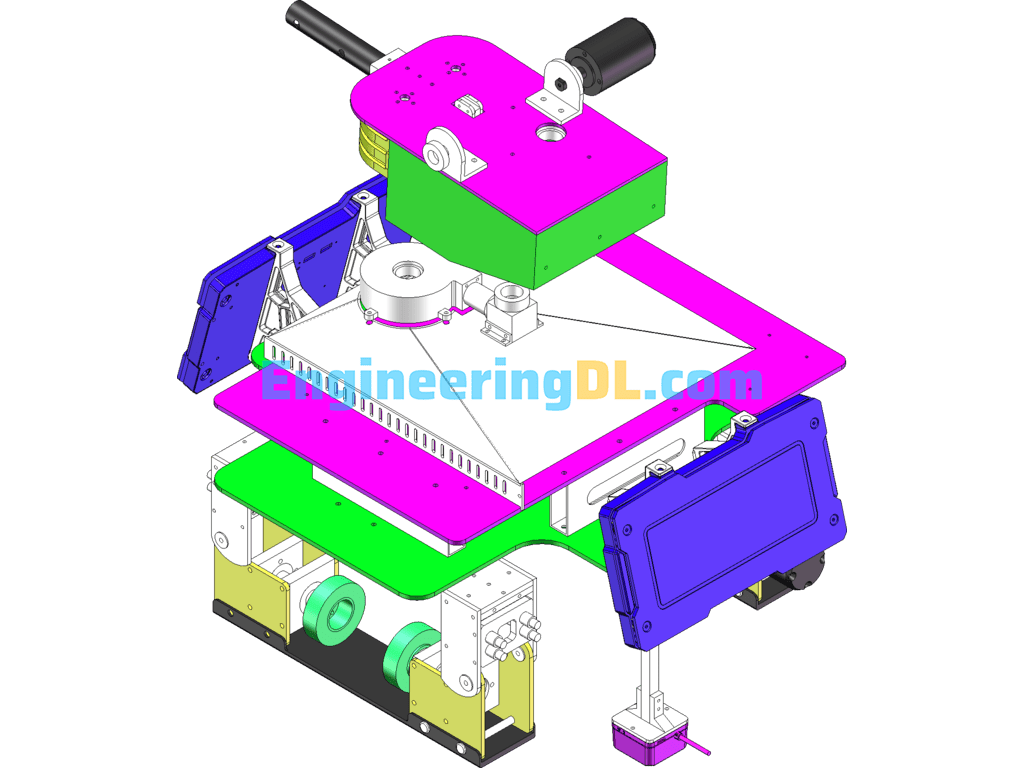
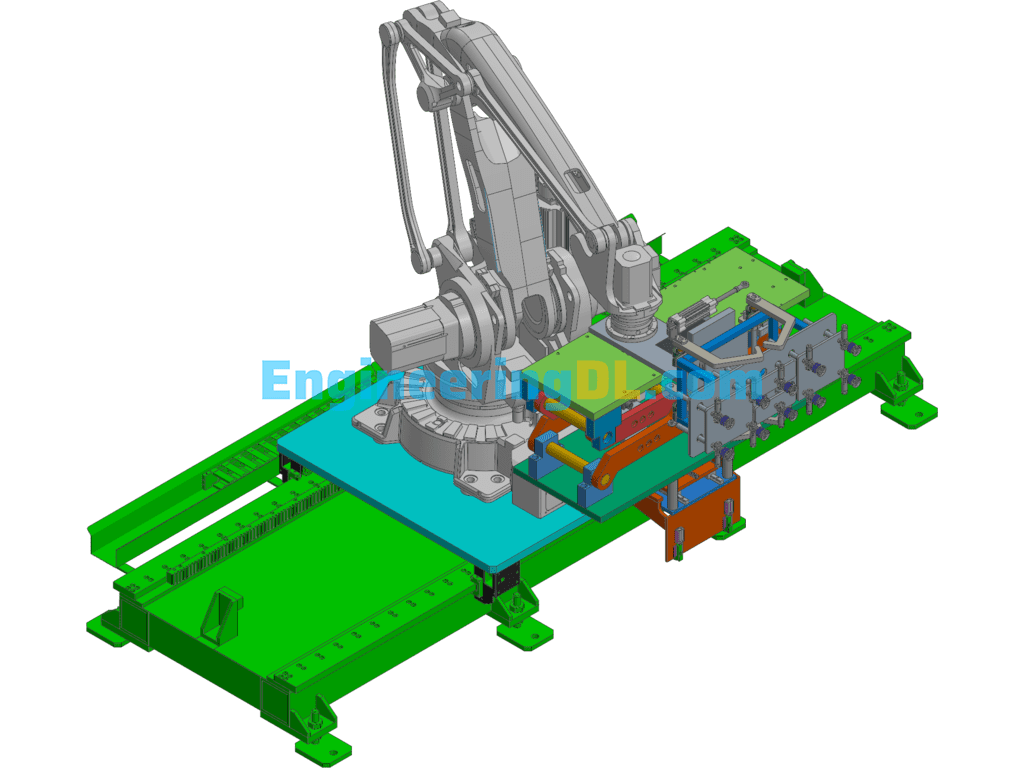
Robot design model for clamping This is a robot design for clamping use, which generally consists of actuators, drives, detection devices and control systems and complex machinery. The robot body, whose arms generally use a spatial open chain linkage mechanism, in which the kinematic subsets (rotating or moving subsets) are often called joints, and the number of joints is usually the number of degrees of freedom of the robot. The number of joints is usually the number of degrees of freedom of the robot. Depending on the type of joint configuration and the form of motion coordinates, the robot actuator can be divided into right-angle coordinate, cylindrical coordinate, polar coordinate and joint coordinate types. For anthropomorphic considerations, the relevant parts of the robot body are often referred to as the base, waist, arm, wrist, hand (gripper or end-effector) and walking parts (for mobile robots), etc.
Specification: Robot Design Model For Clamping Use SolidWorks
|
User Reviews
Be the first to review “Robot Design Model For Clamping Use SolidWorks”
You must be logged in to post a review.


There are no reviews yet.